
CHAPTER 3
Higher Order Linear ODEs

The concepts and methods of solving linear ODEs of order n = 2 extend nicely to linear ODEs of higher order n, that is, n = 3, 4, etc. This shows that the theory explained in Chap. 2 for second-order linear ODEs is attractive, since it can be extended in a straightforward way to arbitrary n. We do so in this chapter and notice that the formulas become more involved, the variety of roots of the characteristic equation (in Sec. 3.2) becomes much larger with increasing n, and the Wronskian plays a more prominent role.
The concepts and methods of solving second-order linear ODEs extend readily to linear ODEs of higher order.
This chapter follows Chap. 2 naturally, since the results of Chap. 2 can be readily extended to that of Chap. 3.
Prerequisite: Secs. 2.1, 2.2, 2.6, 2.7, 2.10.
References and Answers to Problems: App. 1 Part A, and App. 2.
3.1 Homogeneous Linear ODEs
Recall from Sec. 1.1 that an ODE is of nth order if the nth derivative y(n) = dny/dxn of the unknown function y(x) is the highest occurring derivative. Thus the ODE is of the form

where lower order derivatives and y itself may or may not occur. Such an ODE is called linear if it can be written
![]()
(For n = 2 this is (1) in Sec. 2.1 with p1 = p and p0 = q.) The coefficients p0, …, pn−1 and the function r on the right are any given functions of x, and y is unknown. y(n) has coefficient 1. We call this the standard form. (If you have pn(x)y(n), divide by pn(x) to get this form.) An nth-order ODE that cannot be written in the form (1) is called nonlinear.
If r(x) is identically zero, r(x) ≡ 0 (zero for all x considered, usually in some open interval I), then (1) becomes

and is called homogeneous. If r(x) is not identically zero, then the ODE is called nonhomogeneous. This is as in Sec. 2.1.
A solution of an nth-order (linear or nonlinear) ODE on some open interval I is a function y = h(x) that is defined and n times differentiable on I and is such that the ODE becomes an identity if we replace the unknown function y and its derivatives by h and its corresponding derivatives.
Sections 3.1–3.2 will be devoted to homogeneous linear ODEs and Section 3.3 to nonhomogeneous linear ODEs.
Homogeneous Linear ODE: Superposition Principle, General Solution
The basic superposition or linearity principle of Sec. 2.1 extends to nth order homogeneous linear ODEs as follows.
THEOREM 1 Fundamental Theorem for the Homogeneous Linear ODE (2)
For a homogeneous linear ODE (2), sums and constant multiples of solutions on some open interval I are again solutions on I. (This does not hold for a nonhomogeneous or nonlinear ODE!)
The proof is a simple generalization of that in Sec. 2.1 and we leave it to the student.
Our further discussion parallels and extends that for second-order ODEs in Sec. 2.1. So we next define a general solution of (2), which will require an extension of linear independence from 2 to n functions.
DEFINITION General Solution, Basis, Particular Solution
A general solution of (2) on an open interval I is a solution of (2) on I of the form

where y1, …, yn is a basis (or fundamental system) of solutions of (2) on I; that is, these solutions are linearly independent on I, as defined below.
A particular solution of (2) on I is obtained if we assign specific values to the n constants c1, …, cn in (3).
DEFINITION Linear Independence and Dependence
Consider n functions y1(x), …, yn(x) defined on some interval I.
These functions are called linearly independent on I if the equation

implies that all k1, …, kn are zero. These functions are called linearly dependent on I if this equation also holds on I for some k1, …, kn not all zero.
If and only if y1, …, yn are linearly dependent on I, we can express (at least) one of these functions on I as a “linear combination” of the other n − 1 functions, that is, as a sum of those functions, each multiplied by a constant (zero or not). This motivates the term “linearly dependent.” For instance, if (4) holds with k1 ≠ 0, we can divide by k1 and express y1 as the linear combination

Note that when n = 2, these concepts reduce to those defined in Sec. 2.1.
Show that the functions y1 = x2, y2 = 5x, y3 = 2x are linearly dependent on any interval.
Solution.. y2 = 0y1 + 2.5y3. This proves linear dependence on any interval.
Show that y1 = x, y2 = x2, y3 = x3 are linearly independent on any interval, for instance, on −1 ![]() x
x ![]() 2.
2.
Solution. Equation (4) is k1x + k2x2 + k3x3 = 0. Taking (a) x = −1, (b) x = 1, (c) x =2, we get
![]()
k2 = 0 from (a) + (b). Then k3 = 0 from (c) −2(b). Then k1 = 0 from (b). This proves linear independence.
A better method for testing linear independence of solutions of ODEs will soon be explained.
EXAMPLE 3 General Solution. Basis
Solve the fourth-order ODE
![]()
Solution. As in Sec. 2.2 we substitute y = eλx. Omitting the common factor eλx, we obtain the characteristic equation
![]()
This is a quadratic equation in ν = λ2 namely,
![]()
The roots are ν = 1 and 4. Hence λ = −2, −1, 1, 2. This gives four solutions. A general solution on any interval is
![]()
provided those four solutions are linearly independent. This is true but will be shown later.
Initial Value Problem. Existence and Uniqueness
An initial value problem for the ODE (2) consists of (2) and n initial conditions

with given x0 in the open interval I considered, and given K0, …, Kn−1.
In extension of the existence and uniqueness theorem in Sec. 2.6 we now have the following.
THEOREM 2 Existence and Uniqueness Theorem for Initial Value Problems
If the coefficients p0(x), …, pn−1(x) of (2) are continuous on some open interval I and x0 is in I, then the initial value problem (2), (5) has a unique solution y(x) on I.
Existence is proved in Ref. [A11] in App. 1. Uniqueness can be proved by a slight generalization of the uniqueness proof at the beginning of App. 4.
EXAMPLE 4 Initial Value Problem for a Third-Order Euler–Cauchy Equation
Solve the following initial value problem on any open interval I on the positive x-axis containing x = 1.
![]()
Solution. Step 1. General solution. As in Sec. 2.5 we try y = xm. By differentiation and substitution,
![]()
Dropping xm and ordering gives m3 − 6m2 + 11m − 6 = 0. If we can guess the root m = 1. We can divide by m − 1 and find the other roots 2 and 3, thus obtaining the solutions x, x2, x3, which are linearly independent on I (see Example 2). [In general one shall need a root-finding method, such as Newton's (Sec. 19.2), also available in a CAS (Computer Algebra System).] Hence a general solution is
![]()
valid on any interval I, even when it includes x = 0 where the coefficients of the ODE divided by x3 (to have the standard form) are not continuous.
Step 2. Particular solution. The derivatives are y′ = c1 = 2c2x + 3c3x2 and y″ = 2c2 + 6c3x. From this, and y and the initial conditions, we get by setting x = 1

This is solved by Cramer's rule (Sec. 7.6), or by elimination, which is simple, as follows. (b) − (a) gives (d) c2 + 2c3 = −1. Then (c) − 2(d) gives c3 = −1. Then (c) gives c2 = 1. Finally c1 = 2 from (a). Answer: y = 2x + x2 − x3.
Linear Independence of Solutions. Wronskian
Linear independence of solutions is crucial for obtaining general solutions. Although it can often be seen by inspection, it would be good to have a criterion for it. Now Theorem 2 in Sec. 2.6 extends from order n = 2 to any n. This extended criterion uses the Wronskian W of n solutions y1, …, yn defined as the nth-order determinant

Note that W depends on x since y1, …, yn do. The criterion states that these solutions form a basis if and only if W is not zero; more precisely:
THEOREM 3 Linear Dependence and Independence of Solutions
Let the ODE (2) have continuous coefficients p0(x), …, px−1(x) on an open interval I. Then n solutions y1, …, yn of (2) on I are linearly dependent on I if and only if their Wronskian is zero for some x = x0 in I. Furthermore, if W is zero for x = x0, then W is identically zero on I. Hence if there is an x1 in I at which W is not zero, then y1, …, yn are linearly independent on I, so that they form a basis of solutions of (2) on I.
PROOF
(a) Let y1, …, yn be linearly dependent solutions of (2) on I. Then, by definition, there are constants k1, …, kn not all zero, such that for all x in I,
![]()
By n − 1 differentiations of (7) we obtain for all x in I

(7), (8) is a homogeneous linear system of algebraic equations with a nontrivial solution k1, …, kn. Hence its coefficient determinant must be zero for every x on I, by Cramer's theorem (Sec. 7.7). But that determinant is the Wronskian W, as we see from (6). Hence W is zero for every x on I.
(b) Conversely, if W is zero at an x0 in I, then the system (7), (8) with x = x0 has a solution ![]() not all zero, by the same theorem. With these constants we define the solution
not all zero, by the same theorem. With these constants we define the solution ![]() of (2) on I. By (7), (8) this solution satisfies the initial conditions
of (2) on I. By (7), (8) this solution satisfies the initial conditions ![]() . But another solution satisfying the same conditions is y ≡ 0. Hence y* ≡ y by Theorem 2, which applies since the coefficients of (2) are continuous. Together,
. But another solution satisfying the same conditions is y ≡ 0. Hence y* ≡ y by Theorem 2, which applies since the coefficients of (2) are continuous. Together, ![]() on I. This means linear dependence of y1, …, yn on I.
on I. This means linear dependence of y1, …, yn on I.
(c) If W is zero at an x0 in I, we have linear dependence by (b) and then W ≡ 0 by (a). Hence if W is not zero at an x1 in I, the solutions y1, …, yn must be linearly independent on I.
We can now prove that in Example 3 we do have a basis. In evaluating W, pull out the exponential functions columnwise. In the result, subtract Column 1 from Columns 2, 3, 4 (without changing Column 1). Then expand by Row 1. In the resulting third-order determinant, subtract Column 1 from Column 2 and expand the result by Row 2:

A General Solution of (2) Includes All Solutions
Let us first show that general solutions always exist. Indeed, Theorem 3 in Sec. 2.6 extends as follows.
THEOREM 4 Existence of a General Solution
If the coefficients of p0(x), …, pn−1(x) of (2) are continuous on some open interval I, then (2) has a general solution on I.
PROOF
We choose any fixed x0 in I. By Theorem 2 the ODE (2) has n solutions y1, …, yn, where yj satisfies initial conditions (5) with Kj−1 = 1 and all other K's equal to zero. Their Wronskian at x0 equals 1. For instance, when n = 3, then y1(x0) = 1, ![]() ,
, ![]() , and the other initial values are zero. Thus, as claimed,
, and the other initial values are zero. Thus, as claimed,

Hence for any n those solutions y1, …, yn are are linearly independent on I, by Theorem 3. They form a basis on I, and y = c1y1 + … + cnyn is a general solution of (2) on I.
We can now prove the basic property that, from a general solution of (2), every solution of (2) can be obtained by choosing suitable values of the arbitrary constants. Hence an nth-order linear ODE has no singular solutions, that is, solutions that cannot be obtained from a general solution.
THEOREM 5 General Solution Includes All Solutions
If the ODE (2) has continuous coefficients p0(x), …, pn−1(x) on some open interval I, then every solution y = Y(x) of (2) on I is of the form
![]()
where y1, …, yn is a basis of solutions of (2) on I and C1, …, Cn are suitable constants.
PROOF
Let Y be a given solution and y = c1y1 + … + cnyn a general solution of (2) on I. We choose any fixed x0 in I and show that we can find constants c1, …, cn for which y and its first n − 1 derivatives agree with Y and its corresponding derivatives at x0. That is, we should have at x = x0

But this is a linear system of equations in the unknowns c1, …, cn. Its coefficient determinant is the Wronskian W of y1, …, yn at x0. Since y1, …, yn form a basis, they are linearly independent, so that W is not zero by Theorem 3. Hence (10) has a unique solution c1 = C1, …, cn = Cn (by Cramer's theorem in Sec. 7.7). With these values we obtain the particular solution
![]()
on I. Equation (10) shows that y* and its first n − 1 derivatives agree at x0 with Y and its corresponding derivatives. That is, y* and Y satisfy, at x0, the same initial conditions. The uniqueness theorem (Theorem 2) now implies that y* ≡ Y on I. This proves the theorem.
This completes our theory of the homogeneous linear ODE (2). Note that for n = 2 it is identical with that in Sec. 2.6. This had to be expected.
1–6 BASES: TYPICAL EXAMPLES
To get a feel for higher order ODEs, show that the given functions are solutions and form a basis on any interval. Use Wronskians. In Prob. 6, x > 0,
- 1, x, x2, x3, yiv = 0
- ex, e−x, e2x, y″′ − y′ + 2y = 0
- cos x, sin x, x cos x, x sin x, yiv + 2y″ + y = 0
- e−4x, xe−4x, x2e−4x, y″′ + 12y″ + 48y′ + 64y = 0
- 1, e−x cos 2x, e−x sin 2x, y″′ + 2y″ + 5y′ = 0
- 1, x2, x4, x2y″ − 3xy″ + 3y′ = 0
- TEAM PROJECT. General Properties of Solutions of Linear ODEs. These properties are important in obtaining new solutions from given ones. Therefore extend Team Project 38 in Sec. 2.2 to nth-order ODEs. Explore statements on sums and multiples of solutions of (1) and (2) systematically and with proofs. Recognize clearly that no new ideas are needed in this extension from n = 2 to general n.
8–15 LINEAR INDEPENDENCE
Are the given functions linearly independent or dependent on the half-axis x ≥ 0? Give reason.
- 8. x2, 1/x2, 0
- 9. tan x, cot x, 1
- 10. e2x, xe2x, x2e2x
- 11. ex cos x, ex sin x, ex
- 12. sin2 x, cos2 x, cos 2x
- 13. sin x, cos x, sin 2x
- 14. cos2 x, sin2 x, 2π
- 15. cosh 2x, sinh 2x, e2x
- 16. TEAM PROJECT. Linear Independence and Dependence. (a) Investigate the given question about a set S of functions on an interval I. Give an example. Prove your answer.
(1) If S contains the zero function, can S be linearly independent?
(2) If S is linearly independent on a subinterval J of I, is it linearly independent on I?
(3) If S is linearly dependent on a subinterval J of I, is it linearly dependent on I?
(4) If S is linearly independent on I, is it linearly independent on a subinterval J?
(5) If S is linearly dependent on I, is it linearly independent on a subinterval J?
(6) If S is linearly dependent on I, and if T contains S, is T linearly dependent on I?
(b) In what cases can you use the Wronskian for testing linear independence? By what other means can you perform such a test?
3.2 Homogeneous Linear ODEs with Constant Coefficients
We proceed along the lines of Sec. 2.2, and generalize the results from n = 2 to arbitrary n. We want to solve an nth-order homogeneous linear ODE with constant coefficients, written as

where y(n) = dny/dxn etc. As in Sec. 2.2, we substitute y = eλx to obtain the characteristic equation

of (1). If λ is a root of (2), then y = eλx is a solution of (1). To find these roots, you may need a numeric method, such as Newton's in Sec. 19.2, also available on the usual CASs. For general nthere are more cases than for n = 2. We can have distinct real roots, simple complex roots, multiple roots, and multiple complex roots, respectively. This will be shown next and illustrated by examples.
Distinct Real Roots
If all the n roots λ1, …, λn of (2) are real and different, then the n solutions

constitute a basis for all x. The corresponding general solution of (1) is
![]()
Indeed, the solutions in (3) are linearly independent, as we shall see after the example.
Solve the ODE y″′ − 2y″ − y′ + 2y = 0.
Solution. The characteristic equation is λ3 − 2λ2 − λ + 2 = 0. It has the roots −1, 1, 2; if you find one of them by inspection, you can obtain the other two roots by solving a quadratic equation (explain!). The corresponding general solution (4) is y = c1e−x + c2ex + c3e2x.
Linear Independence of (3). Students familiar with nth-order determinants may verify that, by pulling out all exponential functions from the columns and denoting their product by E = exp[λ1 + … + λn)x] the Wronskian of the solutions in (3) becomes

The exponential function E is never zero. Hence W = 0 if and only if the determinant on the right is zero. This is a so-called Vandermonde or Cauchy determinant.1 It can be shown that it equals
![]()
where V is the product of all factors λj − λk with j < k (![]() n); for instance, when n = 3 we get −V = −(λ1 − λ2)(λ1 − λ3)(λ2 − λ3). This shows that the Wronskian is not zero if and only if all the n roots of (2) are different and thus gives the following.
n); for instance, when n = 3 we get −V = −(λ1 − λ2)(λ1 − λ3)(λ2 − λ3). This shows that the Wronskian is not zero if and only if all the n roots of (2) are different and thus gives the following.
Solutions ![]() of (1) (with any real or complex λj's) form a basis of solutions of (1) on any open interval if and only if all n roots of (2) are different.
of (1) (with any real or complex λj's) form a basis of solutions of (1) on any open interval if and only if all n roots of (2) are different.
Actually, Theorem 1 is an important special case of our more general result obtained from (5) and (6):
Any number of solutions of (1) of the form eλx are linearly independent on an open interval I if and only if the corresponding λ are all different.
Simple Complex Roots
If complex roots occur, they must occur in conjugate pairs since the coefficients of (1) are real. Thus, if λ = γ + iω is a simple root of (2), so is the conjugate ![]() , and two corresponding linearly independent solutions are (as in Sec. 2.2, except for notation)
, and two corresponding linearly independent solutions are (as in Sec. 2.2, except for notation)
![]()
EXAMPLE 2 Simple Complex Roots. Initial Value Problem
Solve the initial value problem
![]()
Solution. The characteristic equation is λ3 − λ2 + 100λ − 100 = 0. It has the root 1, as can perhaps be seen by inspection. Then division by λ − 1 shows that the other roots are ±10i Hence a general solution and its derivatives (obtained by differentiation) are

From this and the initial conditions we obtain, by setting x = 0,
![]()
We solve this system for the unknowns A, B, c1. Equation (a) minus Equation (c) gives 101A = 303, A = 3. Then c1 = 1 from (a) and B = 1 from (b). The solution is (Fig. 73)
![]()
This gives the solution curve, which oscillates about ex (dashed in Fig. 73).

Fig. 73. Solution in Example 2
Multiple Real Roots
If a real double root occurs, say, λ1 = λ2, then y1 = y2 in (3), and we take y1 and xy1 as corresponding linearly independent solutions. This is as in Sec. 2.2.
More generally, if λ is a real root of order m, then m corresponding linearly independent solutions are

We derive these solutions after the next example and indicate how to prove their linear independence.
EXAMPLE 3 Real Double and Triple Roots
Solve the ODE yν − 3yiv + 3y″′ − y″ = 0.
Solution. The characteristic equation λ5 − 3λ4 + 3λ3 − λ2 = 0 has the roots λ1 = λ2 = 0, and λ3 = λ4 = λ5 = 1, and the answer is
![]()
Derivation of (7). We write the left side of (1) as
![]()
Let y = eλx. Then by performing the differentiations we have
![]()
Now let λ1 be a root of mth order of the polynomial on the right, where m ![]() n. For m ≤ n let λm+1, …, λn be the other roots, all different from λ1. Writing the polynomial in product form, we then have
n. For m ≤ n let λm+1, …, λn be the other roots, all different from λ1. Writing the polynomial in product form, we then have
![]()
with h(λ) = 1 if m = n, and h(λ) = (λ − λm+1)…(λ − λn) if m < n. Now comes the key idea: We differentiate on both sides with respect to λ,

The differentiations with respect to x and λ are independent and the resulting derivatives are continuous, so that we can interchange their order on the left:

The right side of (9) is zero for λ = λ1 because of the factors λ − λ1 (and m ![]() 2 since we have a multiple root!). Hence
2 since we have a multiple root!). Hence ![]() by (9) and (10). This proves that
by (9) and (10). This proves that ![]() is a solution of (1).
is a solution of (1).
We can repeat this step and produce ![]() by another m − 2 such differentiations with respect to λ. Going one step further would no longer give zero on the right because the lowest power of λ − λ1 would then be (λ − λ1)0, multiplied by m!h(λ) and h(λ1) ≠ 0 because h(λ) has no factors λ − λ1; so we get precisely the solutions in (7).
by another m − 2 such differentiations with respect to λ. Going one step further would no longer give zero on the right because the lowest power of λ − λ1 would then be (λ − λ1)0, multiplied by m!h(λ) and h(λ1) ≠ 0 because h(λ) has no factors λ − λ1; so we get precisely the solutions in (7).
We finally show that the solutions (7) are linearly independent. For a specific n this can be seen by calculating their Wronskian, which turns out to be nonzero. For arbitrary m we can pull out the exponential functions from the Wronskian. This gives (eλx)m = eλmx times a determinant which by “row operations” can be reduced to the Wronskian of 1, x, …, xm−1. The latter is constant and different from zero (equal to 1!2! … (m − 1)!). These functions are solutions of the ODE y(m) = 0, so that linear independence follows from Theroem 3 in Sec. 3.1.
Multiple Complex Roots
In this case, real solutions are obtained as for complex simple roots above. Consequently, if λ = γ + iω is a complex double root, so is the conjugate ![]() . Corresponding linearly independent solutions are
. Corresponding linearly independent solutions are

The first two of these result from eλx and ![]() as before, and the second two from xeλx and
as before, and the second two from xeλx and ![]() in the same fashion. Obviously, the corresponding general solution is
in the same fashion. Obviously, the corresponding general solution is
![]()
For complex triple roots (which hardly ever occur in applications), one would obtain two more solutions x2eγx cos ωx, x2eγx sin ωx, and so on.
1–6 GENERAL SOLUTION
Solve the given ODE. Show the details of your work.
- y″′ + 25y′ = 0
- yiv + 2y″ + y = 0
- yiv + 4y″ = 0
- (D3 − D2 − D + I)y = 0
- (D4 + 10D2 + 9I)y = 0
- (D5 + 8D3 + 16D)y = 0
7–13 INITIAL VALUE PROBLEM
Solve the IVP by a CAS, giving a general solution and the particular solution and its graph.
- 7. y″′ + 3.2y″ + 4.81y′ = 0, y(0) = 3.4, y′(0) = −4.6, y″(0) = 9.91
- 8. y″′ + 7.5y″ + 14.25y′ − 9.125y = 0, y(0) = 10.05, y′(0) = −54.975, y″(0) = 257.5125
- 9. 4y″′ + 8y″ + 41y′ + 37y = 0, y(0) = 9, y′(0) = −6.5, y″(0) = −39.75
- 10.

- 11. yiv − 9y″ − 400y = 0, y(0) = 0, y′(0) = 0, y″ = 41, y″′(0) = 0
- 12. yv − 5y″′ + 4y′ = 0, y(0) = 3, y′(0) = −5, y″(0) = 11, y″′(0) = −23, yiv(0) = 47
- 13. yiv + 0.45y″′ − 0.165y″ + 0.0045y′ − 0.00175y = 0, y(0) = 17.4, y′(0) = −2.82, y″(0) = 2.0485, y″′(0) = −1.458675
- 14. PROJECT. Reduction of Order. This is of practical interest since a single solution of an ODE can often be guessed. For second order, see Example 7 in Sec. 2.1.
(a) How could you reduce the order of a linear constant-coefficient ODE if a solution is known?
(b) Extend the method to a variable-coefficient ODE

Assuming a solution y1 to be known, show that another solution is y2(x) = u(x)y1(x) with u(x) = ∫z(x) dx and z obtained by solving

(c) Reduce

using y1 = x (perhaps obtainable by inspection).
- 15. CAS EXPERIMENT. Reduction of Order. Starting with a basis, find third-order linear ODEs with variable coefficients for which the reduction to second order turns out to be relatively simple.
3.3 Nonhomogeneous Linear ODEs
We now turn from homogeneous to nonhomogeneous linear ODEs of nth order. We write them in standard form

with y(n) = dny/dxn as the first term, and r(x) ![]() 0. As for second-order ODEs, a general solution of (1) on an open interval I of the x-axis is of the form
0. As for second-order ODEs, a general solution of (1) on an open interval I of the x-axis is of the form
![]()
Here yh(x) = c1y1(x) + … + cnyn(x) is a general solution of the corresponding homogeneous ODE
![]()
on I. Also, yp is any solution of (1) on I containing no arbitrary constants. If (1) has continuous r(x) coefficients and a continuous on I, then a general solution of (1) exists and includes all solutions. Thus (1) has no singular solutions.
An initial value problem for (1) consists of (1) and ninitial conditions

with x0 in I. Under those continuity assumptions it has a unique solution. The ideas of proof are the same as those for n = 2 in Sec. 2.7.
Method of Undetermined Coefficients
Equation (2) shows that for solving (1) we have to determine a particular solution of (1). For a constant-coefficient equation

(a0, …, an−1 constant) and special r(x) as in Sec. 2.7, such a yp(x) can be determined by the method of undetermined coefficients, as in Sec. 2.7, using the following rules.
(A) Basic Rule as in Sec. 2.7.
(B) Modification Rule. If a term in your choice for yp(x) is a solution of the homogeneous equation (3), then multiply this term by xk, where k is the smallest positive integer such that this term times xk is not a solution of (3).
(C) Sum Rule as in Sec. 2.7.
The practical application of the method is the same as that in Sec. 2.7. It suffices to illustrate the typical steps of solving an initial value problem and, in particular, the new Modification Rule, which includes the old Modification Rule as a particular case (with k = 1 or 2). We shall see that the technicalities are the same as for n = 2, except perhaps for the more involved determination of the constants.
EXAMPLE 1 Initial Value Problem. Modification Rule
Solve the initial value problem
![]()
Solution. Step 1. The characteristic equation is λ3 + 3λ2 + 3λ + 1 = (λ + 1)3 = 0. It has the triple root λ = −1. Hence a general solution of the homogeneous ODE is

Step 2. If we try yp = Ce−x, we get −C + 3C − 3C + C = 30, which has no solution. Try Cxe−x and Cx2e−x. The Modification Rule calls for

Substitution of these expressions into (6) and omission of the common factor e−x gives
![]()
The linear, quadratic, and cubic terms drop out, and 6C = 30. Hence C = 5. This gives yp = 5x3e−x.
Step 3. We now write down y = yh + yp, the general solution of the given ODE. From it we find c1 by the first initial condition. We insert the value, differentiate, and determine c2 from the second initial condition, insert the value, and finally determine c3 from y″(0) and the third initial condition:

Hence the answer to our problem is (Fig. 73)
![]()
The curve of y begins at (0, 3) with a negative slope, as expected from the initial values, and approaches zero as x → ∞. The dashed curve in Fig. 74 is yp.

Fig. 74. y and yp (dashed) in Example 1
Method of Variation of Parameters
The method of variation of parameters (see Sec. 2.10) also extends to arbitrary order n. It gives a particular solution yp for the nonhomogeneous equation (1) (in standard form with y(n) as the first term!) by the formula

on an open interval I on which the coefficients of (1) and r(x) are continuous. In (7) the functions y1, …, yn form a basis of the homogeneous ODE (3), with Wronskian W, and Wj(j = 1, …, n) is obtained from W by replacing the jth column of W by the column [0 0 … 0 1]T. Thus, when n = 2, this becomes identical with (2) in Sec. 2.10,

The proof of (7) uses an extension of the idea of the proof of (2) in Sec. 2.10 and can be found in Ref [A11] listed in App. 1.
EXAMPLE 2 Variation of Parameters. Nonhomogeneous Euler–Cauchy Equation
Solve the nonhomogeneous Euler–Cauchy equation
![]()
Solution. Step 1. General solution of the homogeneous ODE. Substitution of y = xm and the derivatives into the homogeneous ODE and deletion of the factor xm gives
![]()
The roots are 1, 2, 3 and give as a basis
![]()
Hence the corresponding general solution of the homogeneous ODE is
![]()
Step 2. Determinants needed in (7). These are

Step 3. Integration. In (7) we also need the right side r(x) of our ODE in standard form, obtained by division of the given equation by the coefficient x3 of y″′; thus, r(x) = (x4 ln x)/x3 = x ln x. In (7) we have the simple quotients W1/W = x/2, W2/W = −1, W3/W = 1/(2x). Hence (7) becomes
Simplification gives ![]() . Hence the answer is
. Hence the answer is
![]()
Figure 75 shows Can you explain the shape of this curve? Its behavior near x = 0? The occurrence of a minimum? Its rapid increase? Why would the method of undetermined coefficients not have given the solution?

Fig. 75. Particular solution of the nonhomogeneous Euler–Cauchy equation in Example 2
Application: Elastic Beams
Whereas second-order ODEs have various applications, of which we have discussed some of the more important ones, higher order ODEs have much fewer engineering applications. An important fourth-order ODE governs the bending of elastic beams, such as wooden or iron girders in a building or a bridge.
A related application of vibration of beams does not fit in here since it leads to PDEs and will therefore be discussed in Sec. 12.3.
EXAMPLE 3 Bending of an Elastic Beam under a Load
We consider a beam B of length L and constant (e.g., rectangular) cross section and homogeneous elastic material (e.g., steel); see Fig. 76. We assume that under its own weight the beam is bent so little that it is practically straight. If we apply a load to B in a vertical plane through the axis of symmetry (the x-axis in Fig. 76), B is bent. Its axis is curved into the so-called elastic curve C (or deflection curve). It is shown in elasticity theory that the bending moment M(x) is proportional to the curvature k(x) of C. We assume the bending to be small, so that the deflection y(x) and its derivative y′(x) (determining the tangent direction of C) are small. Then, by calculus, k = y″/(1 + y′2)3/2 ≈ y″. Hence
![]()
EI is the constant of proportionality. E is Young's modulus of elasticity of the material of the beam. I is the moment of inertia of the cross section about the (horizontal) z-axis in Fig. 76.
Elasticity theory shows further that M″ (x) = f(x), where f(x) is the load per unit length. Together,
![]()

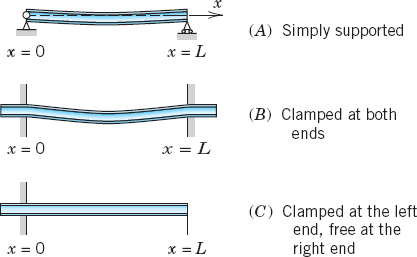
In applications the most important supports and corresponding boundary conditions are as follows and shown in Fig. 77.

The boundary condition y = 0 means no displacement at that point, y′ = 0 means a horizontal tangent, y″ = 0 means no bending moment, and y″′ = 0 means no shear force.
Let us apply this to the uniformly loaded simply supported beam in Fig. 76. The load is f(x) ≡ f0 = const. Then (8) is
![]()
This can be solved simply by calculus. Two integrations give
![]()
y″(0) = 0 gives c2 = 0. Then ![]() (since L ≠ 0). Hence
(since L ≠ 0). Hence
![]()
Integrating this twice, we obtain
![]()
with c4 = 0 from y(0) = 0. Then

Inserting the expression for k, we obtain as our solution
![]()
Since the boundary conditions at both ends are the same, we expect the deflection y(x) to be “symmetric” with respect to L/2, that is, y(x) = y(L − x). Verify this directly or set x = u + L/2 and show that y becomes an even function of u,
![]()
From this we can see that the maximum deflection in the middle at u = 0(x = L/2) is 5f0L4/(16 · 24EI). Recall that the positive direction points downward.
1–7 GENERAL SOLUTION
Solve the following ODEs, showing the details of your work.
- y″′ + 3y″ + 3y′ + y = ex − x − 1
- y″′ + 2y″ − y′ − 2y = 1 − 4x3
- (D4 + 10D2 + 9I)y = 6.5 sinh 2x
- (D3 + 3D2 − 5D − 39I)y = −300 cos x
- (x3D3 + x2D2 − 2xD + 2I)y = x−2
- (D3 + 4D)y = sin x
- (D3 − 9D2 + 27D − 27I)y = 27 sin 3x
8–13 INITIAL VALUE PROBLEM
Solve the given IVP, showing the details of your work.
- 8. yiv − 5y″ + 4y = 10e−3x, y(0) = 1, y′(0) = 0, y′(0) = 0, y″′(0) = 0
- 9. yiv + 5y″ + 4y = 90 sin 4x, y(0) = 1, y′(0) = 2, y″(0) = −1, y″′(0) = −32
- 10. x3y″′ + xy′ − y = x2, y(1) = 1, y′(1) = 3, y″(1) = 14
- 11. (D3 − 2D2 − 3D)y = 74e−3x sin x, y(0) = −1.4, y′(0) = 3.2, y″(0) = −5.2
- 12. (D3 − 2D2 − 9D + 18I)y = e2x, y(0) = 4.5, y′(0) = 8.8, y″(0) = 17.2
- 13. (D3 − 4D)y = 10 cos x + 5 sin x, y(0) = 3, y′(0) = −2, y″(0) = −1
- 14. CAS EXPERIMENT. Undetermined Coefficients. Since variation of parameters is generally complicated, it seems worthwhile to try to extend the other method. Find out experimentally for what ODEs this is possible and for what not. Hint: Work backward, solving ODEs with a CAS and then looking whether the solution could be obtained by undetermined coefficients. For example, consider

and

- 15. WRITING REPORT. Comparison of Methods. Write a report on the method of undetermined coefficients and the method of variation of parameters, discussing and comparing the advantages and disadvantages of each method. Illustrate your findings with typical examples. Try to show that the method of undetermined coefficients, say, for a third-order ODE with constant coefficients and an exponential function on the right, can be derived from the method of variation of parameters.
CHAPTER 3 REVIEW QUESTIONS AND PROBLEMS
- What is the superposition or linearity principle? For what nth-order ODEs does it hold?
- List some other basic theorems that extend from second-order to nth-order ODEs.
- If you know a general solution of a homogeneous linear ODE, what do you need to obtain from it a general solution of a corresponding nonhomogeneous linear ODE?
- What form does an initial value problem for an nth-order linear ODE have?
- What is the Wronskian? What is it used for?
6–15 GENERAL SOLUTION
Solve the given ODE. Show the details of your work.
- 6. yiv − 3y″ − 4y = 0
- 7. y″′ + 4y′ + 13y′ = 0
- 8. y″′ − 4y″ − y′ + 4y = 30e2x
- 9. (D4 − 16I)y = −15 cosh x
- 10. x2y″′ + 3xy″ − 2y′ = 0
- 11. y″′ + 4.5y″ + 6.75y′ + 3.375y = 0
- 12. (D3 − D)y = sinh 0.8x
- 13. (D3 + 6D2 + 12D + 8I)y = 8x2
- 14. (D4 − 13D2 + 36I)y = 12ex
- 15. 4x3y″′ + 3xy′ − 3y = 10
16–20 INITIAL VALUE PROBLEM
Solve the IVP. Show the details of your work.
- 16. (D3 − D2 − D + 1)y = 0, y(0) = 0, Dy(0) = 1, D2y(0) = 0
- 17. y″′ + 5y′ + 24y′ + 20y = x, y(0) = 1.94, y′(0) = −3.95, y″ = −24
- 18. (D4 − 26D2 + 25I)y = 50(x + 1)2, y(0) = 12.16, Dy(0) = −6, D2y(0) = 34, D3y(0) = −130
- 19. (D3 + 9D2 + 23D + 15I)y = 12exp(−4x), y(0) = 9, Dy(0) = −41, D2y(0) = 189
- 20. (D3 + 3D2 + 3D + I)y = 8 sin x, y(0) = −1, y′(0) = −3, y″(0) = 5
SUMMARY OF CHAPTER 3 Higher Order Linear ODEs
Compare with the similar Summary of Chap. 2 (the case n = 2).
Chapter 3 extends Chap. 2 from order n = 2 to arbitrary n. An nth-order linear ODE is an ODE that can be written
![]()
with y(n) = dny/dxn as the first term; we again call this the standard form. Equation (1) is called homogeneous if r(x) ≡ 0 on a given open interval I considered, nonhomogeneous if r(x) ![]() 0 on I. For the homogeneous ODE
0 on I. For the homogeneous ODE
![]()
the superposition principle (Sec. 3.1) holds, just as in the case n = 2. A basis or fundamental system of solutions of (2) on I consists of n linearly independent solutions y1, … yn of (2) on I. A general solution of (2) on I is a linear combination of these,
![]()
A general solution of the nonhomogeneous ODE (1) on I is of the form
![]()
Here, yp is a particular solution of (1) and is obtained by two methods (undetermined coefficients or variation of parameters) explained in Sec. 3.3.
An initial value problem for (1) or (2) consists of one of these ODEs and n initial conditions (Secs. 3.1, 3.3)
![]()
with given x0 in I and given K0, …, Kn−1. If p0, …, pn−1, r are continuous on I, then general solutions of (1) and (2) on I exist, and initial value problems (1), (5) or (2), (5) have a unique solution.
1ALEXANDRE THÉOPHILE VANDERMONDE (1735–1796), French mathematician, who worked on solution of equations by determinants. For CAUCHY see footnote 4, in Sec. 2.5.