
We explored various design philosophies
including motorized joints, wheels hidden in
the fingertips, and flexible camshafts; but in
the end we landed on a single DC drive motor,
accompanied by three servomotors for secondary
animation. The central issue was designing a
fixed mechanical linkage for the pointer, middle,
and ring fingers that would be capable of pulling
the hand forward across a variety of surfaces.
To solve this puzzle, we hired Canadian maker
Ben Eadie, engineering technologist and movie
special effects designer [see “Next Level Radio
Control” on page 31]. Pulling inspiration from the
well-known Strandbeest by Dutch kinetic artist
Theo Jansen, Ben designed a linkage system in
OnShape for each finger comprised of three rigid,
curved “beams” that pivot on one fixed upper
point. The second and third beams are attached
to rotating cams, driven in fixed ratios to one
another by a tightly packed gear stack, which is
powered by a toothed belt and a DC motor. Once
the finger timing was set, each component could
be locked in place relative to each other, and a
dependable pulling or pushing force could be
generated to move the robot forward or back.
Additionally, I designed articulating fingertips,
which when joined to Ben’s upper leg linkage,
created a lifelike “flick” at the end of each step.
The first tethered walking proof of concept was
finished in July, which green-lit the final phase
of design. Updated versions of each component
were modeled and sent out to various CNC
milling shops for speedy manufacture.
The final robot was designed with a bottom-
heavy “mass gradient”: the fingertips and leg
linkages were machined in 303 stainless steel,
while connecting “tendons” and the gear case
frame were cut from lighter 6160 aluminum. Atop
all that, the battery frame and motor housing
are 3D printed in ABS plastic. The result is an
extremely stable standing position that can rock
back and forth on pinky and thumb servos to
achieve lifelike character animation.
All in, the final mech contains close to 50
components, each designed from scratch and
either 3D printed in-house at RHFX, or machined
by our fabrication partners. The finishing touch:
real stitches to close up the silicone skin. Two
identical puppets were built so that any on-set
repairs would not slow down production.
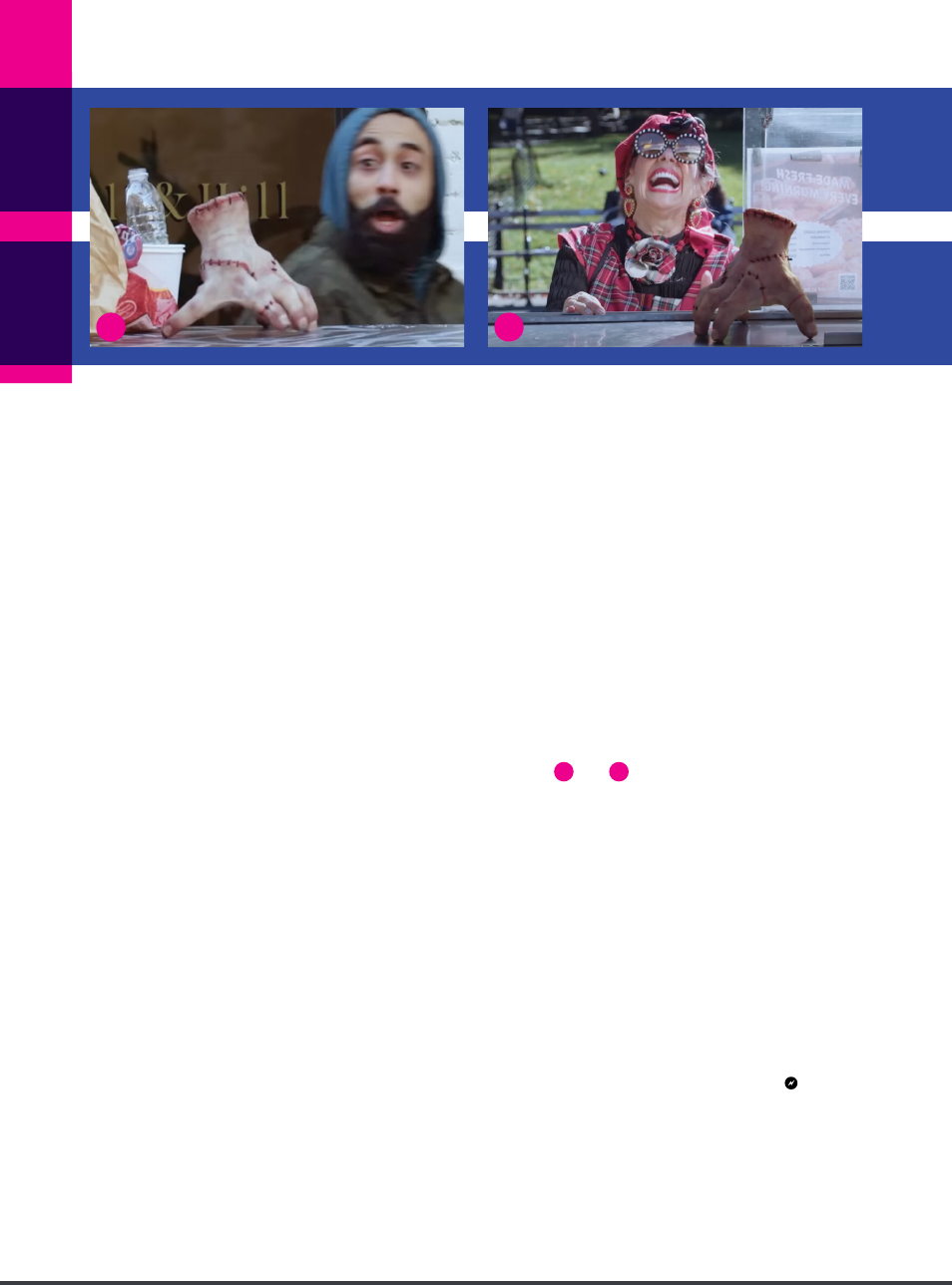
The final result was a lifelike walking hand
which delighted and frightened civilians when
it premiered on the streets of New York City
(Figures
B
and
C
). RHFX definitively proved
that the character could be brought to life with
animatronics. Children screamed, horror fans
laughed, and everyone asked with amazement:
“How did they do that”? Netflix executives and
Tim Burton himself were thoroughly pleased with
the result, and the videos produced have received
upwards of 100 million views worldwide (see for
yourself at youtu.be/B479Wc72Bsc).
Wednesday has become one of Netflix’s most
watched series, with a second season green-lit
for production. If the stars and budgets align, we
may yet see a practical animatronic Thing crawl
on screen sometime in the near future.
• Project lead — Jesse Velez
• Walking mech — Ben Eadie
• Workshop assistant — Miles Berwick
• Moldmakingand skinning — Cali Jones
• Siliconepaint and finish — Mariah Kierns
• Machinist— Chris Mora
R/C PROPS “Thing” Robot Hand
B C
30 makezine.com
M85_028-30_RC_Thing_F1.indd 30M85_028-30_RC_Thing_F1.indd 30 4/9/23 2:01 PM4/9/23 2:01 PM
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.