8
Fog Computing for Energy Harvesting-enabled Internet of Things
S. A. Tegos1, P. D. Diamantoulakis1, D. S. Michalopoulos2, and G. K. Karagiannidis1
1Electrical and Computer Engineering Department, Aristotle University of Thessaloniki, GR-54124, Thessaloniki, Greece
2Nokia Bell Labs, Munich, Germany
8.1 Introduction
With the current advance of the Internet of Things, mobile devices have a significant impact on our lives, such as healthcare, entertainment, daily life, etc. Nevertheless, the successful integration of mobile devices in these applications depends on their capability to execute a massive number of intensive tasks quickly, despite the potentially limited computing resources. Moreover, emerging wireless technologies are characterized by versatile, yet stringent energy efficiency requirements of the deployed devices. A novel paradigm for network decentralization is fog computing, which offers the capability to offload computation-heavy applications, whereas a promising direction to achieve the energy sustainability of the end nodes is based on the utilization of energy harvesting (EH).
Regarding fog computing, it offers the capability to release the mobile devices from heavy computation workloads by offloading tasks to a fog server. Compared with the conventional remote cloud, offloading workload to a fog server reduces the data traffic, the energy consumption of users, and the transmission latency, as it is placed closer to end users. It is noted that the computation offloading can be applied in two ways, i.e. binary and partial offloading [1].
- Binary offloading. The computation task should be offloaded as one unit, as it cannot be partitioned.
- Partial offloading. The task is partitionable, but only one of the two parts can be offloaded.
The utilization of the fog computing technique is particularly useful to the real-time execution of computation tasks requested by low-power devices. Therefore, it has received considerable attention in both academia and industry.
Low-cost mobile devices with small battery capacity may obtain satisfactory computation performance by integrating EH techniques into fog computing. When EH is used, energy can be harvested by ambient energy sources, such as wind energy, solar power, human kinetic energy, and ambient radio frequency (RF) signals. Moreover, wireless power transfer (WPT), which utilizes RF signals, is considered an efficient way to increase the battery life of the devices. Specifically, a dedicated RF energy transmitter, which can charge the battery of remote devices, is utilized in this technique. A significant advantage of WPT is that it is controllable in comparison with harvesting from ambient sources. Currently, commercial WPT transmitters can deliver at the order of 10 μW RF power to a larger distance of 10 m, which can provide adequate power for the operation of EH devices [2].
In the existing literature, there are several works that investigate the integration of fog computing and EH. Single EH user fog systems with binary offloading are considered [3, 4]. Furthermore, fog systems consisting of two EH users adopting time division multiple access (TDMA) are examined where the near user operates as a relay for the far user [5, 6]. Moreover, multiuser fog systems adopting TDMA are considered where both binary and partial offloading are utilized [7, 8], whereas nonorthogonal multiple access (NOMA) has also been investigated in similar systems [9].
In this chapter, the integration of fog computing and EH is considered, according to which tasks can either be executed locally or offloaded to a fog server. More specifically, both EH from ambient sources and WPT are examined. Furthermore, a review of resource allocation problems is presented, emphasizing their categorization, comparison, e.g. in terms of a common objective, and the identified challenges. Moreover, some future research challenges are investigated.
8.2 System Model
In this section, a fog computing system with EH mobile users (MUs) is examined, which is depicted in Figure 8.1. MUs can execute their tasks locally or/and offload them to the fog server. The computing capability of the fog server can improve significantly the computation experience in each MU [10–12].
It is assumed that time is divided into time slots with length T. More specifically, ![]() and
and ![]() are used to denote the index sets of MUs and time slots, respectively. The wireless channel is considered to be independent and identically distributed (i.i.d.) block fading. The channel power gain in the tth time slot is denoted as ht, and ht ∼ fH(x),
are used to denote the index sets of MUs and time slots, respectively. The wireless channel is considered to be independent and identically distributed (i.i.d.) block fading. The channel power gain in the tth time slot is denoted as ht, and ht ∼ fH(x), ![]() , where fH(x) is the probability density function (PDF) of ht.
, where fH(x) is the probability density function (PDF) of ht.
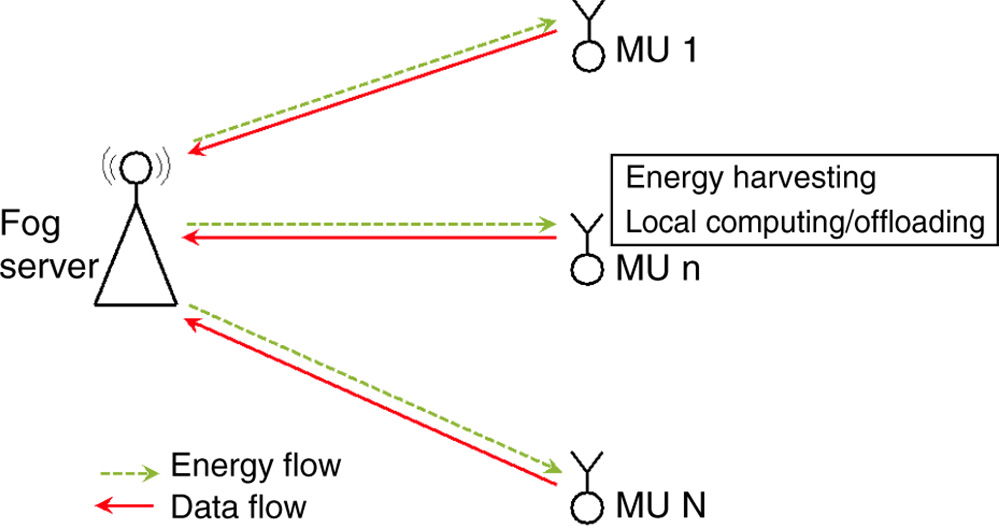
Figure 8.1 Fog system.
8.2.1 Computation Model
We use ![]() to represent a computation task of the nth MU, where Ln denotes the input size of the task, which is measured in bits, and
to represent a computation task of the nth MU, where Ln denotes the input size of the task, which is measured in bits, and ![]() denotes the execution deadline. The computation tasks requested at each MU are modeled as an i.i.d. Bernoulli process, i.e. at the beginning of each time slot, there is a task request with probability ρ, while no task is requested with probability 1 – ρ. The variable
denotes the execution deadline. The computation tasks requested at each MU are modeled as an i.i.d. Bernoulli process, i.e. at the beginning of each time slot, there is a task request with probability ρ, while no task is requested with probability 1 – ρ. The variable ![]() is used as follows:
is used as follows:

i.e. ![]() ,
, ![]() ,
, ![]() . It is assumed that all tasks are delay-sensitive, i.e. their execution deadline is lower or equal to the time slot length
. It is assumed that all tasks are delay-sensitive, i.e. their execution deadline is lower or equal to the time slot length ![]() and also that no buffer is available for queuing the task requests.
and also that no buffer is available for queuing the task requests.
Each MU can either execute the computation tasks locally, and/or offload them to the fog server. However, it is possible that neither of these methods is feasible, i.e. when there is not sufficient energy at the MU and, thus, the task will be dropped.
- Binary Offloading. The set of the computation mode indicators is denoted as
(8.2)

where
 and
and  indicate that the task of the nth MU in the nth time slot is executed locally at the tth MU and offloaded to the fog server, respectively, and
indicate that the task of the nth MU in the nth time slot is executed locally at the tth MU and offloaded to the fog server, respectively, and  indicates that the task is dropped. Therefore, the selection of
indicates that the task is dropped. Therefore, the selection of  should satisfy the following equation:
should satisfy the following equation: - Partial Offloading. The above indicators can be used for the case of partial offloading by extending the above set as
(8.4)

![]() and
and ![]() denote the part of the computation task of the nth MU in the tth time slot that is executed locally at the nth MU and offloaded to the fog server, respectively, and
denote the part of the computation task of the nth MU in the tth time slot that is executed locally at the nth MU and offloaded to the fog server, respectively, and ![]() indicates the part of the computation task that is dropped. Moreover, (8.3) should be satisfied.
indicates the part of the computation task that is dropped. Moreover, (8.3) should be satisfied.
8.2.1.1 Local Execution Model
Let X denote the number of central processing unit (CPU) cycles required for the processing of a one bit input. X differs in each application and can be acquired through off-line measurements [13]. Furthermore, Wn = LnX CPU cycles are needed in order for the nth MU to successfully execute the task ![]() . The set of the frequencies scheduled for the Wn CPU cycles in the tth time slot is denoted as
. The set of the frequencies scheduled for the Wn CPU cycles in the tth time slot is denoted as ![]() , which can be implemented by adjusting the chip voltage with dynamic voltage and frequency scaling (DVFS) techniques. Consequently, the delay for the local execution of the computation task requested in the tth time slot at the nth MU is given by
, which can be implemented by adjusting the chip voltage with dynamic voltage and frequency scaling (DVFS) techniques. Consequently, the delay for the local execution of the computation task requested in the tth time slot at the nth MU is given by
Subsequently, the energy consumption for executing the task in the tth time slot locally at the nth MU can be expressed as
in which ![]() denotes the effective energy coefficient that depends on the chip architecture. Furthermore, the CPU-cycle frequencies are considered to be constrained by
denotes the effective energy coefficient that depends on the chip architecture. Furthermore, the CPU-cycle frequencies are considered to be constrained by ![]() , i.e.
, i.e.
8.2.1.2 Fog Execution Model
If a MU offloads a task to the fog server, we assume that adequate computational power is available at the fog server and, thus, the corresponding computation latency is ignored [14–16]. The transmit power of the nth MU is denoted as ![]() and it should not exceed the maximum transmitted power pmax.
and it should not exceed the maximum transmitted power pmax.
To this end, considering the existence of multiple users, an access protocol should be adopted in order for the users to transmit their tasks to the fog server. In the existing literature, most of the works consider TDMA due to its simple implementation. Nevertheless, NOMA is also investigated, as it can offer an improved performance compared to TDMA.
- TDMA. The achievable rate of the nth MU in the tth time slot, adopting TDMA, can be expressed as
(8.8)

where ω denotes the available bandwidth,
 is the portion of the tth time slot allocated to the nth MU and σ2 is the variance of the equivalent noise at the receiver.
is the portion of the tth time slot allocated to the nth MU and σ2 is the variance of the equivalent noise at the receiver. - NOMA. Adopting uplink NOMA in the offloading phase allows multiple MU to multiplex on the same time slot for offloading their tasks so that the system performance can be massively enhanced. Assuming perfect successive interference cancellation (SIC) at the fog server, the achievable rate of the nth MU in the tth time slot is given by
(8.9)

where it is assumed that ![]() for fairness reasons.
for fairness reasons.
It is further assumed that the computational complexity is relatively low, thus, if the computation task is executed by the fog server, the execution delay is equal to the time needed for the transmission of the specific task and is given by
where ![]() can be the achievable rate adopting either TDMA or NOMA. More-over, the energy consumed by the nth MU for offloading the tasks to the fog server can be expressed as
can be the achievable rate adopting either TDMA or NOMA. More-over, the energy consumed by the nth MU for offloading the tasks to the fog server can be expressed as

8.2.2 Energy Harvesting Model
Fog systems with EH MUs call for redesigned offloading policies, which become more complex than the ones of mobile cloud computing systems. Consequently, an optimal computation offloading strategy should compromise between the computation performance of the current and future tasks, as the battery level in each time slot obtained by the battery level and the consumption in the previous time slot.
8.2.2.1 Stochastic Process
Each MU is equipped with an EH circuit, which is capable of harvesting energy from environments such as human kinetic energy, wind energy, and solar power. Each MU is assumed to be powered only by the harvested renewable energy from the EH circuit. To model the EH process, it is assumed that energy packets successively arrive. To this end, let ![]() denote the units of energy that arrive at the nth MU in the beginning of the tth time slot. It is assumed that energy packet arrivals in different time slots are i.i.d. with the maximum value of
denote the units of energy that arrive at the nth MU in the beginning of the tth time slot. It is assumed that energy packet arrivals in different time slots are i.i.d. with the maximum value of ![]() . Even though the i.i.d. model is simple, it captures the intermittent and stochastic nature of the renewable energy processes [17, 18]. In a practical scenario, only a part of the arrived energy can be stored into the battery. In the tth time slot energy
. Even though the i.i.d. model is simple, it captures the intermittent and stochastic nature of the renewable energy processes [17, 18]. In a practical scenario, only a part of the arrived energy can be stored into the battery. In the tth time slot energy ![]() will be harvested and stored in the battery of the nth MU and will be available for either computation offloading or local execution starting from the next time slot. Thus, the following equation should be satisfied:
will be harvested and stored in the battery of the nth MU and will be available for either computation offloading or local execution starting from the next time slot. Thus, the following equation should be satisfied:
Furthermore, the battery capacity is considered sufficiently large. Moreover, the energy level of the nth MU's battery in the beginning of the tth time slot is denoted as ![]() . Without loss of generality, we assume that B0 = 0 and
. Without loss of generality, we assume that B0 = 0 and ![]() . Furthermore, for the sake of simplicity, energy consumed for purposes other than task offloading and local computation is ignored.
. Furthermore, for the sake of simplicity, energy consumed for purposes other than task offloading and local computation is ignored.
The energy consumed by the nth MU in the tth time slot, denoted as ℰ(Kt, ft, pt), which depends on the selected computation mode, allocated transmit power and scheduled CPU cycle frequencies, is given by
which needs to satisfy the following constraint:
Therefore, the energy level of the nth MU's battery is modified according to the following equation:
8.2.2.2 Wireless Power Transfer
The main disadvantage of conventional EH methods is their dependence on ambient energy sources, which are unpredictable and uncontrollable. Subsequently, harvesting energy from intentionally generated RF signals proves to be an interesting alternative. To this end, WPT has attracted growing interest in wireless communication systems. Nevertheless, WPT creates important challenges in the design of communication systems, as a conflict with the information transmission emerges, since nodes cannot receive information and harvest energy simultaneously [19–21]. In this framework, the users deploy the harvested power to sequentially transmit their information utilizing the harvest-then-transmit protocol [22–24], which is also the core idea investigated in the considered system model.
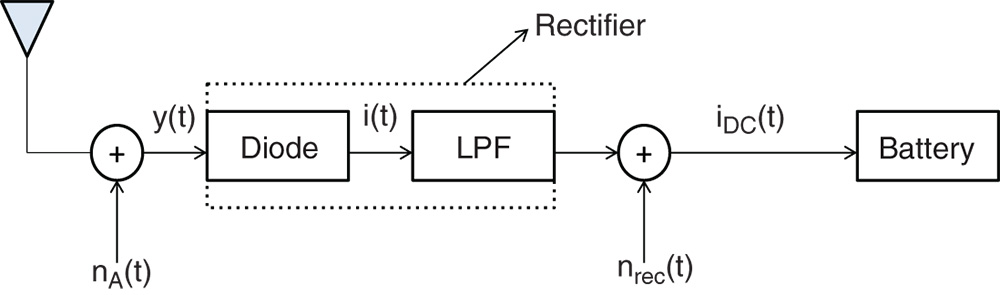
Figure 8.2 Energy receiver.
To perform WPT, each MU is equipped with an energy receiver, which is shown in Figure 8.2. In this receiver, the received RF signal is converted to a direct current (DC) signal by a rectifier consisting of a Schottky diode and a passive low pass filter, which is then stored to the battery.
In the considered system model, we assume that in the beginning of each time slot and for time ![]() , where an ∈ [0, 1] is the portion of the time slot that is used for EH by the nth MU, the fog server, which is also utilized as base station, transmits power to the nth MU which is utilized by them for EH. The transmitted power by the fog server to the nth MU in the tth time slot is denoted by
, where an ∈ [0, 1] is the portion of the time slot that is used for EH by the nth MU, the fog server, which is also utilized as base station, transmits power to the nth MU which is utilized by them for EH. The transmitted power by the fog server to the nth MU in the tth time slot is denoted by ![]() . In the remaining portion of the time slot with duration 1 − an, the nth MU executes locally its computation tasks or/and offloads them to the fog server. This time allocation is depicted in Figure 8.3. In case that it offloads its tasks to the fog server, the harvest-then-transmit(offload) protocol is utilized.
. In the remaining portion of the time slot with duration 1 − an, the nth MU executes locally its computation tasks or/and offloads them to the fog server. This time allocation is depicted in Figure 8.3. In case that it offloads its tasks to the fog server, the harvest-then-transmit(offload) protocol is utilized.

Figure 8.3 Time slot.
Depending on the relationship between the harvested energy and the DC signal, two EH models are used in the literature, i.e. the linear EH model and the nonlinear EH model.
- Linear EH Model. When the linear EH model is adopted, the converted energy in the energy receiver of the nth MU is assumed to be linearly proportional to the expected value of the DC signal, with a conversion efficiency 0 < ηn ≤ 1. Moreover, the harvested energy due to the equivalent processing noise is not considered. Therefore, the energy harvested by the nth MU in the tth time slot can be expressed as
(8.16)

It is observed in the above equation that the harvested energy in this EH model is linear with respect to the portion an of the time slot, which is dedicated to harvesting and also to the transmitted power.
- Nonlinear EH Model. Generally, the harvested energy is nonlinear function of the received RF signal, due to the nonlinearity of the rectifier and more specifically the Schottky diode. To this end, in the literature [25–30], there have been several works considering practical nonlinear EH models. Considering a specific widely used nonlinear EH model, the harvested energy is given by [28]

where ![]() denotes the maximum harvested power of the nth user in the t- th time slot considering the EH circuit is saturated. Moreover, A is a positive constant, which reflects the nonlinear charging rate with respect to threshold. Given the EH circuit, the parameters
denotes the maximum harvested power of the nth user in the t- th time slot considering the EH circuit is saturated. Moreover, A is a positive constant, which reflects the nonlinear charging rate with respect to threshold. Given the EH circuit, the parameters ![]() , A, and B can be determined by the curve fitting.
, A, and B can be determined by the curve fitting.
8.3 Tradeoffs in EH Fog Systems
In the existing literature, some tradeoffs are investigated mainly in the form of optimization problems. Two characteristic examples are presented in this section, i.e. the tradeoff between the energy consumption and the latency and the one between the execution delay and the task dropping cost.
8.3.1 Energy Consumption vs. Latency
The tradeoff between the energy consumption and the latency is discussed in [8]. More specifically, a multiuser fog system with WPT is investigated. Also, TDMA and partial offloading are deployed. The aim of the formulated optimization problem in this work is the minimization of the energy consumption at the fog server considering both the energy consumption for computation and for WPT, assuring that the N users' computation tasks are successfully executed. The energy consumption is minimized with the optimization of the number of offloaded bits, the local CPU frequencies and the time allocation among all users. The local computing latency and the EH constraints are also taken into account.
The problem is optimally solved by standard convex optimization techniques and some interesting conclusions are extracted. First, if the EH constraint is not tight for a user, i.e. this user harvests adequate wireless energy and should compute all the tasks locally. Moreover, it is always beneficial to process some bits locally, which means that offloading all of them to the fog server is not optimal. Furthermore, the more stringent the EH constraint is, the more bits should be offloaded to the fog with a smaller rate, as more time should be allocated for EH. Also, adopting NOMA instead of TDMA in the considered system may be able to improve the system performance [9]. Finally, using the more practical nonlinear EH model, described in (8.17), instead of the ideal linear one, may result in worse performance and higher complexity optimization problem and, thus, it would be an interesting challenge.
8.3.2 Execution Delay vs. Task Dropping Cost
In fog computing systems without EH, a key metric to evaluate the performance is execution delay, which is also utilized for the optimization of the offloading policy of the considered system [14, 16, 31–33]. However, taking into account the stochastic and intermittent nature of the harvested energy, some of the requested tasks cannot be executed and, thus, they are dropped. This phenomenon occurs when the MU has harvested a small amount of energy, because of the fading in the wireless channel between the fog server and the mobile device. In [3], where the considered system consists of the fog server and one MU, a new useful metric, namely execution cost, has been introduced. It is expressed as the weighted sum of the task dropping cost and the execution delay. Taking into account the fact that some tasks may be dropped, each dropped task is penalized by a unit of cost. Considering the earlier, the execution cost in the tth time slot is given by
where ϕ (in seconds) denotes the weight of the task dropping cost, l(·) is the indicator function, and ![]() is given by
is given by
Moreover, it is assumed that the successful execution of a task is preferred to dropping a task, i.e. ![]() . Binary offloading is also deployed. Furthermore, a task, which is decided to be executed, should be completed before the deadline
. Binary offloading is also deployed. Furthermore, a task, which is decided to be executed, should be completed before the deadline ![]() , which means that the following equation should be satisfied:
, which means that the following equation should be satisfied:
Therefore, considering the earlier definitions and assumptions, the aim of the optimization problem is the minimization of the sum of the execution costs in all time slots. Regarding the constraints of the problem, neither fog server execution nor local execution should be performed, unless there is a task request i.e.,
Moreover, in each time slot, the amount of consumed battery energy cannot exceed either Emax, which is necessary for limiting the overdischarge of the battery [34], or the battery energy level in the specific time slot Bt, ![]() . Furthermore, the whole amount of the arrived energy cannot be harvested and only a part of it is stored, which means that
. Furthermore, the whole amount of the arrived energy cannot be harvested and only a part of it is stored, which means that
Also, the transmit power and the CPU-cycle frequency are positive values and cannot exceed pmax and ![]() , respectively. Finally, it should be considered that the computation mode indicators are binary variables, because binary offloading is assumed and (8.3) should be satisfied.
, respectively. Finally, it should be considered that the computation mode indicators are binary variables, because binary offloading is assumed and (8.3) should be satisfied.
A Lyapunov optimization framework is used to solve the above optimization problem, according to which an algorithm is deployed that dynamically computes the optimal offloading policy. The proposed algorithm asymptotically achieves the optimal performance of the optimization problem. However, the optimal solution is achieved at the price of slow convergence and a higher battery capacity requirement. Hence, we can balance the system performance and the required battery capacity/convergence time, by adjusting the control variables.
8.4 Future Research Challenges
The integration of EH and WPT in fog computing is a topic that has attracted a lot of interest recently. Although some useful contributions have been made in this direction, there are still several research challenges that need to be addressed.
In practical systems, a large number of offloading tasks may lead the fog server to overloading, i.e. to a point that its computing power has to be allocated among the received offloading tasks. Subsequently, not only the task offloading time, but also the computation delay at the fog server should be taken into consideration.
Moreover, it is useful to extend EH fog systems to fading channels. It should be noted that it is not necessary to locally compute or offload its tasks in each time slot. In this case, it can be preferable for a MU to remain idle in some time slots and solely save the received energy in its energy storage device. This approach would result in a more complicated analysis, as the time allocation problem would be high dimensional.
Another challenge can be cooperative fog EH systems consisting of more than two users. To this end, users can be allowed to share both the radio and the computing resource. In other words, the users with higher computation power can assist weaker users to execute their tasks. In such systems, the optimization is more complicated, as the energy consumption for executing tasks for other MUs and transmitting the results back to them needs to be estimated and compared with that for offloading the tasks to the fog server.
Furthermore, another research challenge is to combine the concepts of WPT and EH utilizing renewable sources by utilizing a power beacon that is co-located with the fog server. The advantage of this deployment is that the limited availability of energy due to the utilization of renewable sources could be mitigated by the controllable transmission of RF signals.
Finally, it is highlighted that the existing works [5–9] that investigate WPT in fog systems consider various idealizing assumptions ignoring the effect of practical constraints, e.g., nonlinear EH characteristics and hardware impairments, which have not been investigated. To this end, nonlinear EH models as the one presented in the previous section can be utilized.
Acknowledgment
This work was supported by Nokia Bell Labs through the global donation program for Wireless Powered Remote Patient Monitoring (SPRING).
References
- 1 Mao, Y., You, C., Zhang, J. et al. (2017). A survey on mobile edge computing: the communication perspective. IEEE Communication Surveys and Tutorials 19 (4): 2322–2358. ISSN 1553-877X, doi: https://doi.org/10.1109/COMST.2017.2745201.
- 2 Bi, S. and Zhang, R. (2016). Placement optimization of energy and information access points in wireless powered communication networks. IEEE Transactions on Wireless Communications 15 (3): 2351–2364. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2015.2503334.
- 3 Mao, Y., Zhang, J., and Letaief, K.B. (2016). Dynamic computation offloading for mobile-edge computing with energy harvesting devices. IEEE Journal on Selected Areas in Communications 34 (12): 3590–3605. ISSN 0733-8716, doi: https://doi.org/10.1109/JSAC.2016.2611964.
- 4 Zhang, G., Zhang, W., Cao, Y. et al. (2018). Energy-delay trade-off for dynamic offloading in mobile-edge computing system with energy harvesting devices. IEEE Transactions on Industrial Informatics 14 (10): 4642–4655. ISSN 1551-3203, doi: https://doi.org/10.1109/TII.2018. 2843365.
- 5 Hu, X., Wong, K., and Yang, K. (2018). Wireless powered cooperation-assisted mobile edge computing. IEEE Transactions on Wireless Communications 17 (4): 2375–2388. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2018. 2794345.
- 6 Ji, L. and Guo, S. (2019). Energy-efficient cooperative resource allocation in wireless powered mobile edge computing. IEEE Internet of Things Journal 1 ISSN 2327-4662, doi: https://doi.org/10.1109/JIOT.2018.2880812.
- 7 Bi, S. and Zhang, Y.J. (2018). Computation rate maximization for wireless powered mobile-edge computing with binary computation offloading. IEEE Transactions on Wireless Communications 17 (6): 4177–4190. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2018.2821664.
- 8 Wang, F., Xu, J., Wang, X., and Cui, S. (2018). Joint offloading and computing optimization in wireless powered mobile-edge computing systems. IEEE Transactions on Wireless Communications 17 (3): 1784–1797. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2017.2785305.
- 9 Wang, F. and Zhang, X. (2018). Dynamic computation offloading and resource allocation over mobile edge computing networks with energy harvesting capability. In: Proceedings of 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, 1–6. https://doi.org/10.1109/ICC.2018.8422096.
- 10 Barbarossa, S., Sardellitti, S., and Di Lorenzo, P. (2014). Communicating while computing: distributed mobile cloud computing over 5G heterogeneous networks. IEEE Signal Processing Magazine 31 (6): 45–55. ISSN 1053-5888. doi: https://doi.org/10.1109/MSP.2014.2334709.
- 11 Kumar, K. and Lu, Y. (2010). Cloud computing for mobile users: can offloading computation save energy? Computer 43 (4): 51–56. ISSN 0018-9162, doi: https://doi.org/10.1109/MC.2010.98.
- 12 Satyanarayanan, M., Bahl, P., Caceres, R., and Davies, N. (2009). The case for VM-based cloudlets in mobile computing, 8. IEEE Pervasive Computing (4): 14–23. ISSN 1536-1268, doi: https://doi.org/10.1109/MPRV.2009.82.
- 13 Miettinen, A.P. and Nurminen, J.K. (2010). Energy efficiency of mobile clients in cloud computing. HotCloud 10: 4–4.
- 14 Kwak, J., Kim, Y., Lee, J., and Chong, S. (2015). Dream: dynamic resource and task allocation for energy minimization in mobile cloud systems. IEEE Journal on Selected Areas in Communications 33 (12): 2510–2523. ISSN 0733-8716, doi: https://doi.org/10.1109/JSAC.2015.2478718.
- 15 You, C., Huang, K., and Chae, H. (2016). Energy efficient mobile cloud computing powered by wireless energy transfer. IEEE Journal on Selected Areas in Communications 34 (5): 1757–1771. ISSN 0733-8716, doi: https://doi.org/10.1109/JSAC.2016.2545382.
- 16 Zhang, W., Wen, Y., Guan, K. et al. (2013). Energy-optimal mobile cloud computing under stochastic wireless channel. IEEE Transactions on Wireless Communications 12 (9): 4569–4581. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2013.072513.121842.
- 17 Lakshminarayana, S., Quek, T.Q.S., and Poor, H.V. (2014). Cooperation and storage tradeoffs in power grids with renewable energy resources. IEEE Journal on Selected Areas in Communications 32 (7): 1386–1397. ISSN 0733-8716, doi: https://doi.org/10.1109/JSAC.2014.2332093.
- 18 Mao, Y., Zhang, J., and Letaief, K.B. (2015). A Lyapunov optimization approach for green cellular networks with hybrid energy supplies. IEEE Journal on Selected Areas in Communications 33 (12): 2463–2477. ISSN 0733-8716, doi: https://doi.org/10.1109/JSAC.2015.2481209.
- 19 Krikidis, I., Timotheou, S., Nikolaou, S. et al. (2014). Simultaneous wireless information and power transfer in modern communication systems. IEEE Communications Magazine 52 (11): 104–110. ISSN 0163-6804, doi: https://doi.org/10.1109/MCOM.2014.6957150.
- 20 Liu, Y., Wang, L., Elkashlan, M. et al. (2016). Two-way relay networks with wireless power transfer: design and performance analysis. IET Communications 10 (14): 1810–1819. ISSN 1751-8628, doi: https://doi.org/10.1049/iet-com.2015.0728.
- 21 Zhong, C., Suraweera, H.A., Zheng, G. et al. (2014). Wireless information and power transfer with full duplex relaying. IEEE Transactions on Communications 62 (10): 3447–3461. ISSN 0090-6778, doi: https://doi.org/10.1109/TCOMM.2014.2357423.
- 22 Diamantoulakis, P.D., Pappi, K.N., Karagiannidis, G.K. et al. (2017). Joint downlink/uplink design for wireless powered networks with interference. IEEE Access 5: 1534–1547. ISSN 2169-3536, doi: https://doi.org/10.1109/ACCESS.2017.2657801.
- 23 Ju, H. and Zhang, R. (2014). Throughput maximization in wireless powered communication networks. IEEE Transactions on Wireless Communications 13 (1): 418–428. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2013.112513.130760.
- 24 Wu, Q., Tao, M., Kwan Ng, D.W. et al. (2016). Energy-efficient resource allocation for wireless powered communication networks. IEEE Transactions on Wireless Communications 15 (3): 2312–2327. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2015.2502590.
- 25 Clerckx, B. (2018). Wireless information and power transfer: nonlinearity, wave-form design, and rate-energy tradeoff. IEEE Transactions on Signal Processing 66 (4): 847–862. ISSN 1053-587X, doi: https://doi.org/10.1109/TSP.2017. 2775593.
- 26 Xiong, K., Wang, B., and Liu, K.J.R. (2017). Rate-energy region of swipt for MIMO broadcasting under nonlinear energy harvesting model. IEEE Transactions on Wireless Communications 16 (8): 5147–5161. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2017.2706277.
- 27 Wang, S., Xia, M., Huang, K., and Wu, Y. (2017). Wirelessly powered two-way communication with nonlinear energy harvesting model: rate regions under fixed and mobile relay. IEEE Transactions on Wireless Communications 16 (12): 8190–8204. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2017.2758767.
- 28 Kang, J., Kim, I., and Kim, D.I. (2018). Wireless information and power transfer: rate-energy tradeoff for nonlinear energy harvesting. IEEE Transactions on Wireless Communications 17 (3): 1966–1981. ISSN 1536-1276, doi: https://doi.org/10.1109/TWC.2017.2787569.
- 29 Clerckx, B., Zhang, R., Schober, R. et al. (2019). Fundamentals of wireless information and power transfer: from RF energy harvester models to signal and system designs. IEEE Journal on Selected Areas in Communications 37 (1): 4–33. ISSN 0733-8716, doi: https://doi.org/10.1109/JSAC.2018.2872615.
- 30 Tegos, S.A., Diamantoulakis, P.D., Pappi, K.N. et al. (2019). Toward efficient integration of information and energy reception. IEEE Transactions on Communications 67 (9): 6572–6585. https://doi.org/10.1109/TCOMM.2019.2916831.
- 31 Chen, X. (2015). Decentralized computation offloading game for mobile cloud computing. IEEE Transactions on Parallel and Distributed Systems 26 (4): 974–983. ISSN 1045-9219, doi: https://doi.org/10.1109/TPDS.2014. 2316834.
- 32 Huang, D., Wang, P., and Niyato, D. (2012). A dynamic offloading algorithm for mobile computing. IEEE Transactions on Wireless Communications 11 (6): 1991–1995. ISSN 1536-1276. doi: https://doi.org/10.1109/TWC.2012. 041912.110912.
- 33 Muñoz, O., Pascual-Iserte, A., and Vidal, J. (2015). Optimization of radio and computational resources for energy efficiency in latency-constrained application offloading. IEEE Transactions on Vehicular Technology 64 (10): 4738–4755. ISSN 0018-9545, doi: https://doi.org/10.1109/TVT.2014.2372852.
- 34 Sun, S., Dong, M., and Liang, B. (2016). Distributed real-time power balancing in renewable-integrated power grids with storage and flexible loads. IEEE Transactions on Smart Grid 7 (5): 2337–2349. ISSN 1949-3053, doi: https://doi.org/10.1109/TSG.2015.2445794.