6.5. SA in Graph Search
6.5.1. Graph Search
Algorithm SA can formally be extended to graph search.
First, graph-search needs to be transferred into some sort of tree search. There are several strategies dealing with the problem. For example, the procedure presented in Nilsson (1980) is one of the strategies. It generates an explicit graph G and a subset T of graph G called the search tree.
Second, since the branching factor is not a constant, and there is not only one solution path, the depth N at which the goal is located is generally unknown, etc. There is no threshold to be given in the graph-search algorithm. One of the formal algorithm may be given as follows.
Assume that T is a search tree of G, and has m 0-subtrees  . The evaluation function
. The evaluation function  (or
(or  ) defined in
) defined in  is chosen as the local statistic of each individual node in T. The global statistic of each 0-subtree
is chosen as the local statistic of each individual node in T. The global statistic of each 0-subtree  is defined as follows:
is defined as follows:
![]()
Confidence probability γ(0<γ<1) and the width  of confidence intervals are given. Algorithm SAA is performed on
of confidence intervals are given. Algorithm SAA is performed on  . Then we have intervals
. Then we have intervals  .
.
Assume that  is the left most one in real axis. If
is the left most one in real axis. If  does not intersect with
does not intersect with  , then choose
, then choose  , prune
, prune  , and the search continues. If
, and the search continues. If  intersects with one of
intersects with one of  , letting
, letting  and replacing the width
and replacing the width  of confidence intervals by
of confidence intervals by  , restart SAA,…
, restart SAA,…
Similarly, perform SAA on i-subtrees, i=1,2,…
When N is unknown and T is an infinite tree, SAA might not terminate. In order to overcome the difficulty, an upper bound B, the estimate of depth N, may be chosen. If the search reaches the bound, then a new round of SA search starts.
On the other hand, in SAA, the chosen width of confidence intervals is  , where
, where  , but
, but  is unknown beforehand generally. Thus, we may choose a monotonically decreasing series
is unknown beforehand generally. Thus, we may choose a monotonically decreasing series  . At the beginning,
. At the beginning,  is chosen as the width of confidence intervals, if
is chosen as the width of confidence intervals, if  (the left most one in i-subtrees) intersects with one of
(the left most one in i-subtrees) intersects with one of  , then replace
, then replace  by
by  and restart ASM test. In order to prevent the search from not being terminated, a lower bound
and restart ASM test. In order to prevent the search from not being terminated, a lower bound  may be chosen. When
may be chosen. When  if
if  still intersects with
still intersects with  , the current search stops and a new round of SAA starts. Of course, at the beginning a proper
, the current search stops and a new round of SAA starts. Of course, at the beginning a proper  should be chosen as the width of confidence intervals and perform SAA search, where
should be chosen as the width of confidence intervals and perform SAA search, where  is chosen according to previous experience and domain knowledge.
is chosen according to previous experience and domain knowledge.
6.5.2. AND/OR Graph Search
The statistical inference methods can be applied to AND/OR graph search as well. Now, we take the combination of ASM test and GBF search (Pearl, 1984a, 1984b, 2000) as an example to show the SA search in AND/OR graphs.
G is an AND/OR graph and  is a sub-graph generated from G when search reaches a certain stage.
is a sub-graph generated from G when search reaches a certain stage.  is a sub-graph of
is a sub-graph of  and satisfies (1)
and satisfies (1)  contains starting node
contains starting node  , (2) if an expanded AND node p is in
, (2) if an expanded AND node p is in  , then all sub-nodes of p are in
, then all sub-nodes of p are in  , (3) if an expanded OR node p is in
, (3) if an expanded OR node p is in  , then just one of its sub-nodes is in
, then just one of its sub-nodes is in  , (4) there is no ‘UNSOLVABLE’ node in
, (4) there is no ‘UNSOLVABLE’ node in  , (5) n is a node in
, (5) n is a node in  . In this case,
. In this case,  is called a solution base of G containing node n.
is called a solution base of G containing node n.
In GBF search, a graph evaluation function  is used to judge the most promising solution base. Then the graph (base) is expanded according to node evaluation function
is used to judge the most promising solution base. Then the graph (base) is expanded according to node evaluation function  .
.
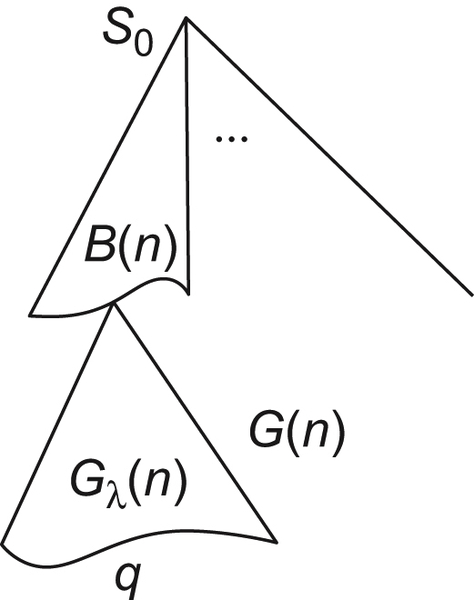
Assume that  is a solution base of G containing n.
is a solution base of G containing n.  is a sub-graph of G rooted at n.
is a sub-graph of G rooted at n.  is an expanded part of
is an expanded part of  and has k nodes. For
and has k nodes. For  , let
, let  be a graph evaluation function of a solution base containing node q (Fig. 6.9). Thus,
be a graph evaluation function of a solution base containing node q (Fig. 6.9). Thus,  reflects some property of a set of solution graphs that potentially generated from
reflects some property of a set of solution graphs that potentially generated from  .
.
Assume that G is a  -game tree and has a unique optimal solution. Statistic
-game tree and has a unique optimal solution. Statistic  satisfies a hypothesis similar to Hypothesis I. Using ASM as hypothesis testing method S, in the 2n-th level let the confidence probability be
satisfies a hypothesis similar to Hypothesis I. Using ASM as hypothesis testing method S, in the 2n-th level let the confidence probability be  , the width of confidence intervals be
, the width of confidence intervals be  , where
, where  is a constant, and the threshold be
is a constant, and the threshold be  , where c is a constant and independent of n. If the complexity of SGBF is defined as the average number of frontier nodes tested by the algorithm (Pearl, 1984a, 1984b), then we have the following theorem.
, where c is a constant and independent of n. If the complexity of SGBF is defined as the average number of frontier nodes tested by the algorithm (Pearl, 1984a, 1984b), then we have the following theorem.
Theorem 6.14
When SGBF searches a  - double game tree, it can find the goal with probability one and its upper bound of complexity is
- double game tree, it can find the goal with probability one and its upper bound of complexity is  .
.
Theorem 6.15
When SGBF searches a  - double game tree, if there is a MAX win strategy by letting the threshold be
- double game tree, if there is a MAX win strategy by letting the threshold be  , c is a constant, in the 2n-th level, then MAX will win with probability
, c is a constant, in the 2n-th level, then MAX will win with probability  , and its upper bound of complexity is
, and its upper bound of complexity is  .
.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.