
Wait-Free Computability for General Tasks
Abstract
Although many tasks of interest are colorless, there are “inherently colored” tasks that cannot be defined without taking process names into account. Some have wait-free read-write protocols, and some do not. This chapter gives a characterization of wait-free read-write solvability for general tasks. We will see that general tasks are harder to analyze than colorless tasks. Allowing tasks to depend on process names seems like a minor change, but it will have sweeping consequences.
Keywords
Cauchy sequence; Lebesgue number; Chromatic subdivision; Deformation retraction; Hourglass task; Hyperplane; Link-connected; Mesh; Open cover; Safe agreement
Although many tasks of interest are colorless, there are “inherently colored” tasks that have no corresponding colorless task. Some are wait-free solvable, but not by any colorless protocol; others are not wait-free solvable. In this chapter we give a characterization of wait-free solvability of general tasks. We will see that general tasks are harder to analyze than colorless tasks. Allowing tasks to depend on process names seems like a minor change, but it will have sweeping consequences.
11.1 Inherently colored tasks: the hourglass task
Not all tasks can be expressed as colorless tasks. For example, the weak symmetry-breaking task discussed in Chapter 9 cannot be expressed as a colorless task, since one process cannot adopt the output value of another.
Theorem 4.3.1 states that a colorless task ![]() has an
has an ![]() -process wait-free layered snapshot protocol if and only if there is a continuous map
-process wait-free layered snapshot protocol if and only if there is a continuous map ![]() carried by
carried by ![]() . Can we generalize this theorem to colorless tasks? A simple example shows that a straightforward generalization will not work.
. Can we generalize this theorem to colorless tasks? A simple example shows that a straightforward generalization will not work.
Consider the following Hourglass task, whose input and output complexes are shown in Figure 11.1. There are three processes: ![]() , and
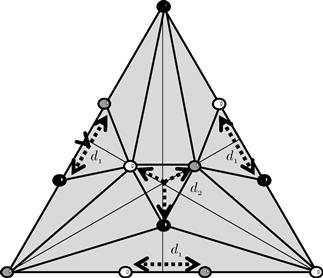
, and ![]() , denoted by black, white, and gray, respectively, and only one input simplex. The carrier map defining this task is shown in tabular form in Figure 11.2 and in schematic form in Figure 11.3. Informally, this task is constructed by taking the standard chromatic subdivision and “pinching” it at the waist to identify (that is, “glue together”)
, denoted by black, white, and gray, respectively, and only one input simplex. The carrier map defining this task is shown in tabular form in Figure 11.2 and in schematic form in Figure 11.3. Informally, this task is constructed by taking the standard chromatic subdivision and “pinching” it at the waist to identify (that is, “glue together”) ![]() ’s vertices on the edges representing its two-process executions.
’s vertices on the edges representing its two-process executions.
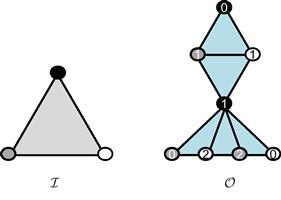
Figure 11.1 Input and output complexes for the Hourglass task. If a vertex ![]() is labeled with
is labeled with ![]() , then a process that chooses output vertex
, then a process that chooses output vertex ![]() in the Hourglass task chooses
in the Hourglass task chooses ![]() ’s input value for the
’s input value for the ![]() -set agreement task. Note that each triangle is labeled with at most two process names.
-set agreement task. Note that each triangle is labeled with at most two process names.
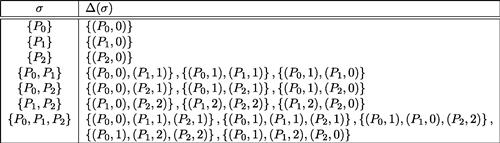
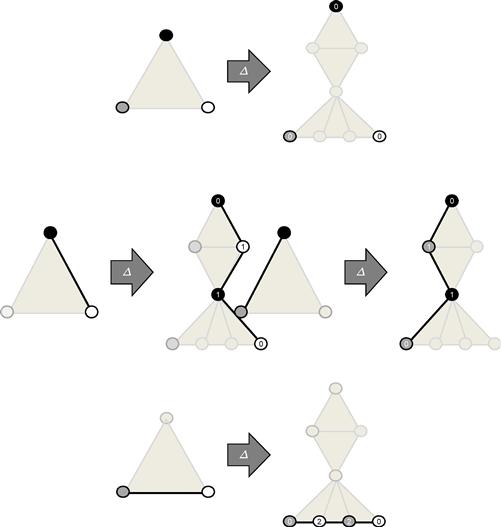
Figure 11.3 Carrier map for the Hourglass task. Single-process executions are at the top, executions for ![]() and
and ![]() on the middle left executions for
on the middle left executions for ![]() and
and ![]() on the middle right, and executions for
on the middle right, and executions for ![]() and
and ![]() on the bottom.
on the bottom.
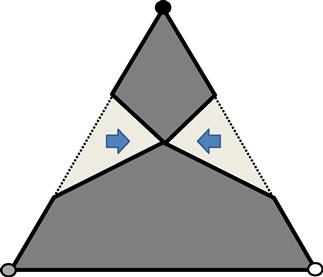
Note that the Hourglass task satisfies the conditions of Theorem 4.3.1: There is a continuous map ![]() carried by
carried by ![]() , shown schematically in Figure 11.4.1
, shown schematically in Figure 11.4.1
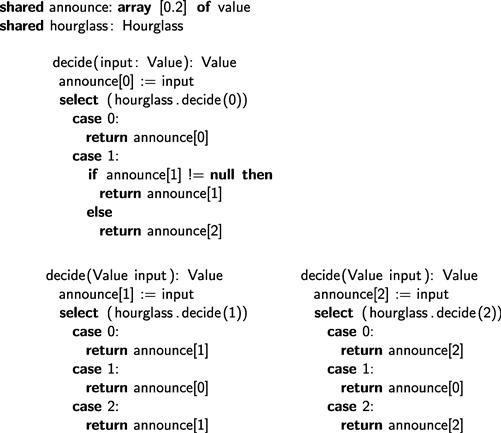
Nevertheless, even though this task satisfies the conditions of Theorem 4.3.1, it does not have a wait-free layered immediate-snapshot protocol. Perhaps the simplest demonstration is merely to observe that we can solve 2-set agreement by composing a layered immediate snapshot protocol with a protocol for the Hourglass task. It follows that if we had a layered immediate snapshot hourglass protocol, then this composition would yield a layered immediate snapshot protocol for 2-set agreement, which we know to be impossible.
The composite protocol is shown in Figure 11.5. The processes share an array announce[], with one entry for each process, initially null. Process ![]() first writes its input value to announce[i]and then calls the layered snapshot Hourglass protocol. If that call returns 0,
first writes its input value to announce[i]and then calls the layered snapshot Hourglass protocol. If that call returns 0, ![]() may be running by itself, so it decides its own input. Otherwise, the processes behave differently. If the Hourglass protocol returns 1 to
may be running by itself, so it decides its own input. Otherwise, the processes behave differently. If the Hourglass protocol returns 1 to ![]() , then
, then ![]() is running concurrently with either
is running concurrently with either ![]() or
or ![]() , or both, so it decides announce[1]if it is not null ; otherwise it decides announce[2]. If the Hourglass protocol returns 1 to
, or both, so it decides announce[1]if it is not null ; otherwise it decides announce[2]. If the Hourglass protocol returns 1 to ![]() or
or ![]() , it decides announce[0]. If the Hourglass protocol returns 2, the process decides its own input. Figure 11.6 labels each output vertex with its corresponding decision value. It is easy to check that in each execution, the processes decide at most two distinct values.
, it decides announce[0]. If the Hourglass protocol returns 2, the process decides its own input. Figure 11.6 labels each output vertex with its corresponding decision value. It is easy to check that in each execution, the processes decide at most two distinct values.

Since there is no wait-free snapshot protocol for ![]() -set agreement, there cannot be a wait-free snapshot protocol for the Hourglass task. Why does Theorem 4.3.1 fail to hold for colored tasks? One direction still works: Given a protocol
-set agreement, there cannot be a wait-free snapshot protocol for the Hourglass task. Why does Theorem 4.3.1 fail to hold for colored tasks? One direction still works: Given a protocol ![]() solving the task
solving the task ![]() , it is easy to extend the proof of Theorem 4.3.1 to exploit the connectivity of the snapshot protocol complex to construct a continuous map
, it is easy to extend the proof of Theorem 4.3.1 to exploit the connectivity of the snapshot protocol complex to construct a continuous map ![]() . Composing this map with the decision map yields a continuous map
. Composing this map with the decision map yields a continuous map ![]() carried by
carried by ![]() .
.
The other direction fails. Given a continuous map ![]() carried by
carried by ![]() , it is possible to construct a simplicial approximation
, it is possible to construct a simplicial approximation ![]() carried by
carried by ![]() , but that simplicial approximation may not be color-preserving. In other words, one process may be assigned another’s output value. Such flexibility is not an issue with colorless tasks, where by definition a process’s inputs and outputs do not depend on its identity. By contrast, for tasks such as weak symmetry breaking or Hourglass, an output legal for one process may not be legal for another.
, but that simplicial approximation may not be color-preserving. In other words, one process may be assigned another’s output value. Such flexibility is not an issue with colorless tasks, where by definition a process’s inputs and outputs do not depend on its identity. By contrast, for tasks such as weak symmetry breaking or Hourglass, an output legal for one process may not be legal for another.
11.2 Solvability for colored tasks
Recall that a simplex ![]() is chromatic if each vertex is labeled with a distinct color, and a chromatic subdivision
is chromatic if each vertex is labeled with a distinct color, and a chromatic subdivision ![]() is a subdivision of
is a subdivision of ![]() where
where
(1) each simplex of the subdivision is chromatic,
(2) for each ![]() , each vertex in
, each vertex in ![]() is labeled with a color from
is labeled with a color from ![]() .
.
We are now ready to state our main theorem.
Theorem 11.2.1
A task ![]() has a wait-free layered immediate snapshot protocol if and only if
has a wait-free layered immediate snapshot protocol if and only if ![]() has a chromatic subdivision
has a chromatic subdivision ![]() and a color-preserving simplicial map
and a color-preserving simplicial map
![]()
carried by ![]() .
.
Theorem 11.2.1 is depicted schematically in Figure 11.7. The figure’s top half shows how a task is specified by a carrier map ![]() that takes each simplex
that takes each simplex ![]() of the input complex
of the input complex ![]() to a subcomplex
to a subcomplex ![]() of the output complex
of the output complex ![]() . The bottom half shows how the simplicial map
. The bottom half shows how the simplicial map ![]() maps each simplex of a chromatic subdivision
maps each simplex of a chromatic subdivision ![]() to a simplex in the output complex such that every
to a simplex in the output complex such that every ![]() is carried to a simplex in
is carried to a simplex in ![]() .
.
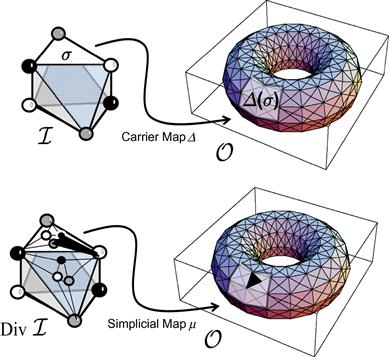
It is impossible to build such a color-preserving simplicial map for the Hourglass task because the “pinch” in the middle makes it impossible for any simplicial map to be color-preserving.
In Chapter 10 we saw that the (colorless) consensus task has no wait-free layered immediate snapshot protocol. We can illustrate how Theorem 11.2.1 works by relaxing the consensus task’s requirements as follows:
Quasi-Consensus Each of ![]() and
and ![]() is given a binary input. If both have input
is given a binary input. If both have input ![]() , then both must decide
, then both must decide ![]() . If they have mixed inputs, then either they agree or
. If they have mixed inputs, then either they agree or ![]() may decide
may decide ![]() and
and ![]() may decide 1 (but not vice versa).
may decide 1 (but not vice versa).
Figure 11.8 shows the input and output complexes for the quasi-consensus task. Note that quasi-consensus is not a colorless task. Does it have a wait-free read-write protocol?

It is easy to see that there is no color-preserving simplicial map carried by ![]() from the input complex to the output complex. The vertices of input simplex
from the input complex to the output complex. The vertices of input simplex ![]() map to
map to ![]() and
and ![]() , but there is no single output simplex containing both vertices. Nevertheless, there is a map satisfying the conditions of the theorem from a subdivision
, but there is no single output simplex containing both vertices. Nevertheless, there is a map satisfying the conditions of the theorem from a subdivision ![]() of the input complex. If input simplex
of the input complex. If input simplex ![]() is subdivided as shown in Figure 11.9, then it can be “folded” around the output complex, allowing input vertices
is subdivided as shown in Figure 11.9, then it can be “folded” around the output complex, allowing input vertices ![]() and
and ![]() to be mapped to their counterparts in the output complex.
to be mapped to their counterparts in the output complex.
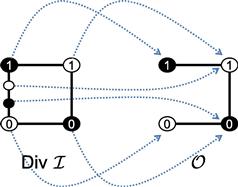
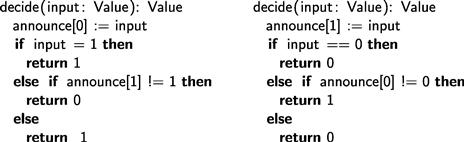
Figure 11.10 shows a simple protocol for quasi-consensus. If ![]() has input 0 and
has input 0 and ![]() has input 1, then this protocol admits three distinct executions: one in which both decide
has input 1, then this protocol admits three distinct executions: one in which both decide ![]() , one in which both decide
, one in which both decide ![]() , and one in which
, and one in which ![]() decides 0 and
decides 0 and ![]() decides 1. These three executions correspond to the three simplices in the subdivision of
decides 1. These three executions correspond to the three simplices in the subdivision of ![]() , which are carried to the edges
, which are carried to the edges ![]() , and
, and ![]() .
.
11.3 Algorithm implies map
One direction of Theorem 11.2.1 is straightforward: If ![]() solves
solves ![]() , then the protocol’s simplicial decision map
, then the protocol’s simplicial decision map
![]()
is color-preserving and carried by ![]() . On the other hand, any wait-free layered immediate snapshot protocol complex
. On the other hand, any wait-free layered immediate snapshot protocol complex ![]() is a chromatic subdivision of the input complex
is a chromatic subdivision of the input complex ![]() .
.
11.4 Map implies algorithm
Assume we are given a task ![]() , a chromatic subdivision
, a chromatic subdivision ![]() of the input complex, and a color-preserving simplicial map
of the input complex, and a color-preserving simplicial map ![]() carried by
carried by ![]() . We will show that this task has a wait-free read-write protocol.
. We will show that this task has a wait-free read-write protocol.
Our strategy is to show there exists a color-preserving simplicial map
![]()
for some ![]() such that for all
such that for all ![]() . These maps compose as follows:
. These maps compose as follows:
![]()
Here is how to turn these maps into a protocol. From an input simplex ![]() , each process performs the following three steps:
, each process performs the following three steps:
step 1. execute an ![]() -layer immediate snapshot protocol, halt on a vertex
-layer immediate snapshot protocol, halt on a vertex ![]() of the simplicial complex
of the simplicial complex ![]() ,
,
It is easy to check that all processes halt on the vertices of a single simplex in ![]() . Moreover, because all maps are color-preserving, each process halts on an output vertex of matching color.
. Moreover, because all maps are color-preserving, each process halts on an output vertex of matching color.
Because the identity map ![]() is continuous, it has a simplicial approximation
is continuous, it has a simplicial approximation ![]() carried by
carried by ![]() (Theorem 3.7.5). Unfortunately, there is no guarantee that this map is color-preserving. To provide such a guarantee, we will prove the following generalization of the Simplicial Approximation theorem:
(Theorem 3.7.5). Unfortunately, there is no guarantee that this map is color-preserving. To provide such a guarantee, we will prove the following generalization of the Simplicial Approximation theorem:
Theorem 11.4.1
If ![]() is a chromatic complex, and
is a chromatic complex, and ![]() is a chromatic subdivision of
is a chromatic subdivision of ![]() , then there exists a color-preserving simplicial map
, then there exists a color-preserving simplicial map
![]()
such that for all ![]() ,
, ![]() .
.
Both ![]() and
and ![]() are abstract complexes, defined in purely combinatorial terms. Nevertheless, we do not know how to prove the existence of this map in a combinatorial way. Instead, we will work with geometric complexes, embedded in high-dimensional Euclidean space, where we can exploit tools provided by point-set topology. Henceforth, all simplices and complexes will be geometric unless explicitly stated otherwise, so we will not always distinguish between a simplex or complex and its polyhedron. The exact meaning should be clear from context.
are abstract complexes, defined in purely combinatorial terms. Nevertheless, we do not know how to prove the existence of this map in a combinatorial way. Instead, we will work with geometric complexes, embedded in high-dimensional Euclidean space, where we can exploit tools provided by point-set topology. Henceforth, all simplices and complexes will be geometric unless explicitly stated otherwise, so we will not always distinguish between a simplex or complex and its polyhedron. The exact meaning should be clear from context.
11.4.1 Basic concepts from point-set topology
Recall that geometric simplices “live” in a a Euclidean space of high but finite dimension. Any such space is a metric space, where the distance between points ![]() and
and ![]() is denoted
is denoted ![]() . The open
. The open ![]() -ball
-ball ![]() around a point
around a point ![]() is the set of points
is the set of points ![]() such that
such that ![]() for some
for some ![]() . An
. An ![]() -ball is an open set.
-ball is an open set.
A Cauchy sequence is an infinite sequence of points ![]() with the property that the distance between successive points
with the property that the distance between successive points ![]() limits to zero.
limits to zero.
Fact 11.4.2
In Euclidean space, every Cauchy sequence ![]() converges to a point
converges to a point ![]() , meaning that for any
, meaning that for any ![]() , there is an integer
, there is an integer ![]() such that
such that ![]() for all
for all ![]() .
.
The set of points that can be expressed as affine combinations of points ![]() ,
,
![]()
where ![]() , is called the hyperplane defined by those points. If a hyperplane is generated by
, is called the hyperplane defined by those points. If a hyperplane is generated by ![]() affinely-independent points, then it has dimension
affinely-independent points, then it has dimension ![]() . A set of points need not be affinely independent to define a hyperplane, so a hyperplane generated by
. A set of points need not be affinely independent to define a hyperplane, so a hyperplane generated by ![]() arbitrary points has dimension at most
arbitrary points has dimension at most ![]() .
.
As long as a finite set of hyperplanes does not fill up the entire space, any point has arbitrarily small neighborhoods that include points not on any hyperplane.
Fact 11.4.3
If ![]() is a point and
is a point and ![]() a finite set of hyperplanes, each of dimension less than
a finite set of hyperplanes, each of dimension less than ![]() , then there is an
, then there is an ![]() such that for every
such that for every ![]() ,
, ![]() contains a point not on any hyperplane in
contains a point not on any hyperplane in ![]() .
.
Moreover, any point not on any hyperplane has arbitrarily small neighborhoods that do not intersect the hyperplane.
Fact 11.4.4
If ![]() is a point and
is a point and ![]() a finite set of hyperplanes, each of dimension less than
a finite set of hyperplanes, each of dimension less than ![]() , none of which contains
, none of which contains ![]() , then there is an
, then there is an ![]() such that
such that ![]() does not intersect any hyperplane in
does not intersect any hyperplane in ![]() .
.
Definition 11.4.5
An open cover ![]() for a simplicial complex
for a simplicial complex ![]() is a finite collection of open sets
is a finite collection of open sets ![]() such that
such that ![]() .
.
The following fact is the basis for the Simplicial Approximation theorem used in earlier chapters.
Fact 11.4.6
If ![]() an open cover for a finite simplicial complex
an open cover for a finite simplicial complex ![]() , there exists a real number
, there exists a real number ![]() , called the Lebesgue number, such that any set of diameter less than
, called the Lebesgue number, such that any set of diameter less than ![]() lies in a single
lies in a single ![]() .
.
11.4.2 Geometric complexes
In Chapter 9, we defined the standard chromatic subdivision ![]() in a purely combinatorial way, as an abstract simplicial complex. Now we give an equivalent definition of
in a purely combinatorial way, as an abstract simplicial complex. Now we give an equivalent definition of ![]() as a geometric complex.
as a geometric complex.
Definition 11.4.7
Recall that ![]() , as an abstract complex, is defined as follows. First, each vertex is a pair
, as an abstract complex, is defined as follows. First, each vertex is a pair ![]() , where
, where ![]() , and
, and ![]() . Second, if
. Second, if ![]() and
and ![]() are vertices of
are vertices of ![]() , then
, then ![]() or vice versa. Finally, if
or vice versa. Finally, if ![]() , then
, then ![]() .
.
We need to assign a point within ![]() to each
to each ![]() . Recall that
. Recall that ![]() is the barycenter of
is the barycenter of ![]() . Let
. Let ![]() be any real value such that
be any real value such that ![]() . For each
. For each ![]() and simplex
and simplex ![]() , define
, define
![]()
See Figure 11.11.
For any sufficiently small value of ![]() , it can be shown that this definition gives a geometric construction for the chromatic subdivision. We will use this construction for the remainder of this section. Since all simplices and complexes in this section are geometric, we will not distinguish between an abstract vertex
, it can be shown that this definition gives a geometric construction for the chromatic subdivision. We will use this construction for the remainder of this section. Since all simplices and complexes in this section are geometric, we will not distinguish between an abstract vertex ![]() and the point
and the point ![]() or an abstract simplex
or an abstract simplex ![]() and its polyhedron
and its polyhedron ![]() .
.
Recall (Definition 3.6.7) that the mesh of a complex is the maximum diameter of any simplex.
Fact 11.4.8
For an ![]() -simplex
-simplex ![]() ,
, ![]() .
.
By taking sufficiently large ![]() can be made arbitrarily small.
can be made arbitrarily small.
11.4.3 Colors and covers
Fact 11.4.9
A set of vertices ![]() of a complex
of a complex ![]() forms a simplex if and only if the intersection of their open stars is non-empty:
forms a simplex if and only if the intersection of their open stars is non-empty:

To construct a color-preserving simplicial map from ![]() to
to ![]() , we will need the vertex colors to “align” nicely. More specifically, the open stars of the vertices in a
, we will need the vertex colors to “align” nicely. More specifically, the open stars of the vertices in a ![]() form an open cover for
form an open cover for ![]() . This open-star cover has a natural coloring inherited from the coloring of
. This open-star cover has a natural coloring inherited from the coloring of ![]() . The open-star cover of
. The open-star cover of ![]() is chromatic on
is chromatic on ![]() if every simplex of
if every simplex of ![]() is covered by open stars of vertices of a simplex in
is covered by open stars of vertices of a simplex in ![]() of matching color:
of matching color:
![]()
for some ![]() where
where ![]() .
.
We will show that without loss of generality, the geometric realization of ![]() can be chosen so that its open-star cover is chromatic on any iterated standard chromatic subdivision of
can be chosen so that its open-star cover is chromatic on any iterated standard chromatic subdivision of ![]() .
.
Lemma 11.4.10
The geometric realization of ![]() can be chosen so that its open-star cover is chromatic on each of the subdivisions
can be chosen so that its open-star cover is chromatic on each of the subdivisions
![]()
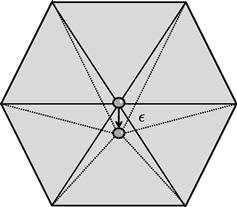
Figure 11.12 shows how an open-star covering can fail to be chromatic. Simplices of ![]() are shown with dotted lines and square vertices, whereas simplices of
are shown with dotted lines and square vertices, whereas simplices of ![]() are shown with solid lines and round vertices. The gray vertex marked
are shown with solid lines and round vertices. The gray vertex marked ![]() lies on the boundary between two gray open stars, so it is not covered by an open star of the same color.
lies on the boundary between two gray open stars, so it is not covered by an open star of the same color.
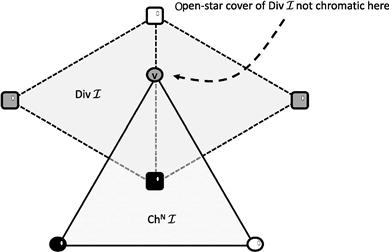
Figure 11.12 How an open-star covering can fail to be chromatic. Simplices of ![]() are shown with dotted lines and square vertices; simplices of
are shown with dotted lines and square vertices; simplices of ![]() are shown with solid lines and round vertices. The gray vertex marked
are shown with solid lines and round vertices. The gray vertex marked ![]() lies on the boundary between two gray open stars, so this open-star covering fails to be chromatic.
lies on the boundary between two gray open stars, so this open-star covering fails to be chromatic.
Note, however, that if we perturb some of the square vertices by an arbitrarily small amount, then ![]() moves off the boundary and into the open star of a vertex of matching color. This observation suggests a strategy: We will pick an arbitrary geometric realization of
moves off the boundary and into the open star of a vertex of matching color. This observation suggests a strategy: We will pick an arbitrary geometric realization of ![]() , and if its open-star cover fails to be chromatic, then we will “perturb” vertex positions by very small amounts until the open-star cover becomes chromatic.
, and if its open-star cover fails to be chromatic, then we will “perturb” vertex positions by very small amounts until the open-star cover becomes chromatic.
Readers willing to accept Lemma 11.4.10 can skip directly to Section 11.4.4.
We can recast some familiar concepts in terms of convex combinations. Every point ![]() in the polyhedron of a complex
in the polyhedron of a complex ![]() can be expressed uniquely as the convex combination of the vertices of a simplex
can be expressed uniquely as the convex combination of the vertices of a simplex ![]() of
of ![]() . The open star
. The open star ![]() is just the set of points that can be expressed as the convex combination of the vertices of a simplex that includes
is just the set of points that can be expressed as the convex combination of the vertices of a simplex that includes ![]() .
.
In this definition and in the subsequent lemmas, ![]() and
and ![]() may be replaced by arbitrary chromatic subdivisions. Two simplices conflict if they share no colors.
may be replaced by arbitrary chromatic subdivisions. Two simplices conflict if they share no colors.
Definition 11.4.11
A conflict point for ![]() and
and ![]() is a point that can be expressed as the convex combination of vertices of two conflicting simplices,
is a point that can be expressed as the convex combination of vertices of two conflicting simplices, ![]() and
and ![]() , were
, were ![]() :
:
for ![]() and
and ![]() .
.
Lemma 11.4.12
The open-star cover of ![]() is chromatic for
is chromatic for ![]() if and only if there are no conflict points.
if and only if there are no conflict points.
Proof
As noted, every point ![]() in
in ![]() has a unique expression as the convex combination of the vertices of a
has a unique expression as the convex combination of the vertices of a ![]() , and similarly for a
, and similarly for a ![]() .
.
If ![]() is a conflict point, then it lies in the interior of
is a conflict point, then it lies in the interior of ![]() but not in
but not in ![]() for any vertex
for any vertex ![]() where
where ![]() . The open stars of
. The open stars of ![]() with colors from
with colors from ![]() therefore fail to cover
therefore fail to cover ![]() .
.
If the open-star cover is chromatic, then every ![]() lies in the open star of some vertex
lies in the open star of some vertex ![]() of
of ![]() and
and ![]() of
of ![]() such that
such that ![]() , implying that
, implying that ![]() is not a conflict point.
is not a conflict point. ![]()
Corollary 11.4.13 follows because the definition of conflict point is symmetric in terms of the two subdivisions.
Corollary 11.4.13
If the open-star cover of ![]() is chromatic on
is chromatic on ![]() , then the open-star cover of
, then the open-star cover of ![]() is chromatic on
is chromatic on ![]() .
.
We say that ![]() has an
has an ![]() -perturbation at vertex
-perturbation at vertex ![]() for some
for some ![]() if there is a point
if there is a point ![]() , such that replacing
, such that replacing ![]() with
with ![]() in each simplex of
in each simplex of ![]() yields a subdivision
yields a subdivision ![]() isomorphic to
isomorphic to ![]() . (This isomorphism means that both complexes are geometric realizations of the same abstract complex.) See Figure 11.13. For brevity, we write such a perturbation as:
. (This isomorphism means that both complexes are geometric realizations of the same abstract complex.) See Figure 11.13. For brevity, we write such a perturbation as:
![]()
If ![]() is the result of applying
is the result of applying ![]() -perturbations at multiple vertices, we write:
-perturbations at multiple vertices, we write:
![]()
We will see that there is always an ![]() such that any vertex of a
such that any vertex of a ![]() can be perturbed to any position within
can be perturbed to any position within ![]() within its carrier.
within its carrier.
Lemma 11.4.14
If ![]() is a vertex in
is a vertex in ![]() whose carrier is an
whose carrier is an ![]() -simplex
-simplex ![]() , then there is an
, then there is an ![]() -perturbation
-perturbation
![]()
for any ![]() .
.
Proof
We must check that any choice of ![]() yields a subdivision. We can pick
yields a subdivision. We can pick ![]() small enough that
small enough that ![]() lies in the open star of
lies in the open star of ![]() . We must check that
. We must check that ![]() can be made affinely independent of each simplex
can be made affinely independent of each simplex ![]() in
in ![]() . Each such
. Each such ![]() defines a hyperplane
defines a hyperplane ![]() of dimension
of dimension ![]() . Because each
. Because each ![]() is a simplex of
is a simplex of ![]() ,
, ![]() are affinely independent, and hence
are affinely independent, and hence ![]() is not in any
is not in any ![]() . By Fact 11.4.4, there is an
. By Fact 11.4.4, there is an ![]() so that for any
so that for any ![]() ,
, ![]() , and thus is affinely independent of the vertices of
, and thus is affinely independent of the vertices of ![]() .
. ![]()
Lemma 11.4.15
If ![]() is a vertex of
is a vertex of ![]() whose carrier is an
whose carrier is an ![]() -simplex
-simplex ![]() , then there is a perturbation
, then there is a perturbation ![]() such that
such that ![]() contains no conflict points with
contains no conflict points with ![]() .
.
Proof
Let ![]() be the set of hyperplanes defined by all pairs of conflicting simplices, one from
be the set of hyperplanes defined by all pairs of conflicting simplices, one from ![]() and one from
and one from ![]() . By Fact 11.4.3, there is an
. By Fact 11.4.3, there is an ![]() so that some point
so that some point ![]() within
within ![]() of
of ![]() does not intersect any of these hyperplanes. By Lemma 11.4.14, this choice of
does not intersect any of these hyperplanes. By Lemma 11.4.14, this choice of ![]() defines a perturbation
defines a perturbation ![]() .
.
We claim that ![]() and
and ![]() have no conflict points. Otherwise, if
have no conflict points. Otherwise, if ![]() is a conflict point, then there are conflicting simplices
is a conflict point, then there are conflicting simplices ![]() in
in ![]() and
and ![]() in
in ![]() such that
such that

where ![]() , and
, and ![]() . And yet, this equation implies that
. And yet, this equation implies that ![]() lies on the hyperplane defined by the vertices of
lies on the hyperplane defined by the vertices of ![]() , which contradicts the choice of
, which contradicts the choice of ![]() .
. ![]()
Lemma 11.4.16
If ![]() is a vertex of
is a vertex of ![]() whose carrier is an
whose carrier is an ![]() -simplex
-simplex ![]() , then there is a perturbation
, then there is a perturbation ![]() such that
such that ![]() has no conflict points with any of the subdivisions
has no conflict points with any of the subdivisions
![]()
Proof
By Lemma 11.4.14, there is a ![]() such that
such that ![]() is a perturbation for any
is a perturbation for any ![]() .
.
We inductively construct a sequence of subdivisions
![]()
such that ![]() has no conflict points with
has no conflict points with ![]() .
.
For the base case, the open-star cover of ![]() is already a chromatic cover for
is already a chromatic cover for ![]() , so let
, so let ![]() and
and ![]() .
.
For the induction step, Lemma 11.4.15 states that there is a perturbation
![]()
such that ![]() has no conflict points with
has no conflict points with ![]() .
.
If we pick each
![]()
then ![]() is a Cauchy sequence that converges to
is a Cauchy sequence that converges to ![]() , where
, where
As a result, we have constructed a perturbation
![]()
where ![]() and
and ![]() have no conflict points for all
have no conflict points for all ![]() .
. ![]()
Lemma 11.4.17
Every chromatic subdivision ![]() has a perturbation
has a perturbation
![]()
such that ![]() has no conflict points with any of the subdivisions
has no conflict points with any of the subdivisions
![]()
Proof
By induction on ![]() . In the base case, when
. In the base case, when ![]() , the claim is trivial because both complexes are discrete sets of vertices.
, the claim is trivial because both complexes are discrete sets of vertices.
Inductively assume that the open-star cover of ![]() is chromatic for each of
is chromatic for each of
![]()
For each vertex ![]() in
in ![]() whose carrier has dimension
whose carrier has dimension ![]() , Lemma 11.4.16 states that we can construct a perturbation that eliminates all conflict points from its open star. Successively applying this construction to each such vertex yields a perturbation
, Lemma 11.4.16 states that we can construct a perturbation that eliminates all conflict points from its open star. Successively applying this construction to each such vertex yields a perturbation
![]()
that has no conflict points with any iterated standard chromatic subdivision ![]() .
. ![]()
Because ![]() and its perturbation
and its perturbation ![]() are just different geometric realizations of the same abstract complex, we have completed the proof of Lemma 11.4.10.
are just different geometric realizations of the same abstract complex, we have completed the proof of Lemma 11.4.10.
11.4.4 Construction
We are now ready to prove Theorem 11.4.1, showing there exists a color-preserving simplicial map
![]()
such that for all ![]() ,
, ![]() .
.
We will construct a sequence of chromatic subdivisions, ![]() , for
, for ![]() , where
, where ![]() , along with a sequence of simplicial maps
, along with a sequence of simplicial maps
![]()
defined on ![]() , except for a subcomplex
, except for a subcomplex ![]() of dimension at most
of dimension at most ![]() .
.
At the end of the sequence, ![]() is empty, so
is empty, so
![]()
is the desired map.
This sequence of subdivisions induces a parent map,
![]()
carrying each vertex of ![]() to the unique vertex of matching color in its carrier in
to the unique vertex of matching color in its carrier in ![]() . The ancestors of a vertex
. The ancestors of a vertex ![]() are the vertices
are the vertices ![]() .
.
Subdividing ![]() induces subdivisions on its subcomplexes. Given a subcomplex
induces subdivisions on its subcomplexes. Given a subcomplex ![]() , define
, define ![]() to be the maximal subcomplex of
to be the maximal subcomplex of ![]() satisfying
satisfying ![]() . Similarly, for
. Similarly, for ![]() , define
, define ![]() to be the maximal subcomplex of
to be the maximal subcomplex of ![]() satisfying
satisfying ![]() .
.
Definition 11.4.18
The extended star ![]() of a simplex
of a simplex ![]() in a complex
in a complex ![]() is the union of the stars of its vertices:
is the union of the stars of its vertices:
![]()
Like the star of a vertex, the extended star of a simplex is a subcomplex of ![]() , and its polyhedron is a closed set. Moreover,
, and its polyhedron is a closed set. Moreover,
![]()
For the base case of our construction, let ![]() , and
, and ![]() is everywhere undefined.
is everywhere undefined.
For the inductive step, assume we are given ![]() and
and ![]() for all
for all ![]() .
.
Lemma 11.4.10 states that we may assume, without loss of generality, that the open-star cover of ![]() is chromatic for
is chromatic for ![]() , including
, including ![]() , the subcomplex where
, the subcomplex where ![]() is undefined. Let
is undefined. Let ![]() be the Lebesgue number of this cover of
be the Lebesgue number of this cover of ![]() . Pick
. Pick ![]() large enough that for every facet
large enough that for every facet ![]() of
of ![]() ,
,
![]() (11.4.1)
(11.4.1)
We will use this inequality later.
We define ![]() as follows: Each vertex
as follows: Each vertex ![]() in
in ![]() not in
not in ![]() “inherits” the map from its parent:
“inherits” the map from its parent: ![]() . Otherwise, for each vertex in
. Otherwise, for each vertex in ![]() , if there exits a vertex
, if there exits a vertex ![]() such that
such that
![]() (11.4.2)
(11.4.2)
and ![]() , then
, then ![]() .
.
The remaining vertices of ![]() define
define ![]() , the subcomplex of
, the subcomplex of ![]() where
where ![]() is not defined. Note that this definition implies that for
is not defined. Note that this definition implies that for ![]() ,
,
![]() (11.4.3)
(11.4.3)
Lemma 11.4.19
Let ![]() be a vertex in
be a vertex in ![]() , and
, and ![]() its sequence of ancestors. Let
its sequence of ancestors. Let ![]() be the least index (earliest ancestor) for which
be the least index (earliest ancestor) for which ![]() is defined. We claim that
is defined. We claim that
![]()
Proof
We argue by induction on ![]() . For the base case, when
. For the base case, when ![]() , the claim follows because
, the claim follows because ![]() is defined for the first time by Equation 11.4.2.
is defined for the first time by Equation 11.4.2.
Assume the result for ![]() . By the induction hypothesis,
. By the induction hypothesis,
![]()
where ![]() is the least index for which
is the least index for which ![]() is defined for an ancestor of
is defined for an ancestor of ![]() . Note that
. Note that ![]() is a subdivision of
is a subdivision of ![]() , and
, and ![]() is a vertex in the carrier of
is a vertex in the carrier of ![]() for this subdivision, so
for this subdivision, so
![]()
Putting these containments together,
Lemma 11.4.20
Each ![]() is a color-preserving simplicial map.
is a color-preserving simplicial map.
Proof
The color-preserving property is immediate from Equation 11.4.2. To show that ![]() is simplicial, we argue by induction on
is simplicial, we argue by induction on ![]() . When
. When ![]() , the claim holds vacuously. Let
, the claim holds vacuously. Let ![]() be a simplex of
be a simplex of ![]() . We must show that
. We must show that ![]() is a simplex of
is a simplex of ![]() .
.
By Lemma 11.4.19, for each ![]() , there is a
, there is a ![]() such that for each vertex
such that for each vertex ![]() ,
,
![]()
Assume without loss of generality that ![]() , so
, so
![]()
In particular, ![]() is a vertex of them all.
is a vertex of them all.
![]()
for ![]() , so
, so
It follows from Fact 11.4.9 that ![]() is a simplex of
is a simplex of ![]() , completing the proof that
, completing the proof that ![]() is a simplicial map.
is a simplicial map. ![]()
Lemma 11.4.21
For ![]() .
.
Proof
Recall that the open-star cover of ![]() is chromatic on
is chromatic on ![]() . Moreover, by Equation 11.4.1, the number
. Moreover, by Equation 11.4.1, the number ![]() is large enough to ensure that the diameter of the extended star of every facet
is large enough to ensure that the diameter of the extended star of every facet ![]() of
of ![]() is less than the cover’s Lebesgue number:
is less than the cover’s Lebesgue number:
![]()
for a vertex ![]() . Because the cover is chromatic, there is a vertex
. Because the cover is chromatic, there is a vertex ![]() of matching color:
of matching color: ![]() . Because
. Because ![]() ,
,
![]()
so by Equation 11.4.2, ![]() is defined, and
is defined, and ![]() is not a vertex of
is not a vertex of ![]() . In this way,
. In this way, ![]() is defined on at least one vertex of every facet of
is defined on at least one vertex of every facet of ![]() , so the dimension of
, so the dimension of ![]() drops by at least one.
drops by at least one. ![]()
Lemma 11.4.20 states that the vertex map
![]()
is color-preserving and simplicial, whereas Lemma 11.4.21 states that ![]() is empty. Together these imply that
is empty. Together these imply that
![]()
is a color-preserving simplicial map.
This completes the proof of the “map implies algorithm” direction of Theorem 11.2.1.
It is useful to observe that the “property implies protocol” part of the proof assumes only that the model of computation in which the protocol is constructed is strong enough to solve the immediate snapshot task.
Corollary 11.4.22
A task ![]() has a protocol in any model of computation that solves immediate snapshot if
has a protocol in any model of computation that solves immediate snapshot if ![]() has a chromatic subdivision
has a chromatic subdivision ![]() and a color-preserving simplicial map
and a color-preserving simplicial map ![]()
![]() carried by
carried by ![]() .
.
Of course, the converse of this corollary does not hold in general.
11.5 A sufficient topological condition
We now give a simple topological condition that ensures that a colored task ![]() has a wait-free read-write protocol. We will use the following topological property.
has a wait-free read-write protocol. We will use the following topological property.
Definition 11.5.1
A pure simplicial complex ![]() of dimension
of dimension ![]() is called link-connected if for each simplex
is called link-connected if for each simplex ![]() ,
, ![]() is
is ![]() -connected.
-connected.
The output complex for the Hourglass task shown in Figure 11.1 is not link-connected, since the vertex at the hourglass’s “waist” is disconnected, that is, not 0-connected.
Theorem 11.5.2
The colored task ![]() has a wait-free layered immediate snapshot protocol if for each
has a wait-free layered immediate snapshot protocol if for each ![]() ,
, ![]() is
is ![]() -connected, and
-connected, and ![]() is link-connected.
is link-connected.
This theorem establishes the existence of a protocol in terms of the topological properties of complexes and carrier maps.
By Theorem 11.2.1, it is enough to prove the following lemma.
Lemma 11.5.3
If for each ![]() ,
, ![]() is
is ![]() -connected, and
-connected, and ![]() is link-connected, then there exists a chromatic subdivision
is link-connected, then there exists a chromatic subdivision ![]() and a color-preserving simplicial map
and a color-preserving simplicial map
![]()
carried by ![]() .
.
We need the following lemma about link connectivity.
Lemma 11.5.4
If ![]() is a pure link-connected simplicial complex, then so is
is a pure link-connected simplicial complex, then so is ![]() for any simplex
for any simplex ![]() .
.
Proof
Assume ![]() . Note that
. Note that ![]() is a pure
is a pure ![]() -complex, and for any
-complex, and for any ![]() in
in ![]() . We will show that for any
. We will show that for any ![]() in
in ![]() is
is ![]() -connected.
-connected.
We claim that
![]()
If ![]() , then
, then ![]() , and therefore
, and therefore ![]() , so
, so
![]()
Moreover, if ![]() , then
, then ![]() , and therefore
, and therefore ![]() , so
, so
![]()
Because ![]() and
and ![]() are disjoint,
are disjoint, ![]() . The complex
. The complex ![]() is link-connected by hypothesis, so
is link-connected by hypothesis, so ![]() , and therefore
, and therefore ![]() , is
, is ![]() -connected.
-connected. ![]()
We make use of the following fact, discussed in the chapter notes.
Fact 11.5.5
Let ![]() , and
, and ![]() be complexes such that
be complexes such that ![]() , and
, and ![]() a continuous map such that the vertex map induced by
a continuous map such that the vertex map induced by ![]() restricted to
restricted to ![]() is simplicial. There exists a subdivision
is simplicial. There exists a subdivision ![]() of
of ![]() such that
such that ![]() , and a simplicial map
, and a simplicial map ![]() that agrees with
that agrees with ![]() on vertices of
on vertices of ![]() .
.
Lemma 11.5.6
Let ![]() and
and ![]() be
be ![]() -complexes such that there is a continuous map
-complexes such that there is a continuous map
![]()
such that the restriction of ![]() to
to ![]() is a rigid simplicial map. There exist a subdivision
is a rigid simplicial map. There exist a subdivision ![]() that
that ![]() and a rigid simplicial map
and a rigid simplicial map ![]() that agrees with
that agrees with ![]() on vertices of
on vertices of ![]() .
.
Proof
We argue by induction on ![]() . For the base case, when
. For the base case, when ![]() is a graph, and
is a graph, and ![]() is a set of discrete points. By way of contradiction, assume that every subdivision
is a set of discrete points. By way of contradiction, assume that every subdivision ![]() and every simplicial map
and every simplicial map
![]()
that agrees with ![]() on
on ![]() collapses an edge of
collapses an edge of ![]() .
.
Pick ![]() and
and ![]() to collapse a minimal number of edges. There is an edge
to collapse a minimal number of edges. There is an edge ![]() in
in ![]() such that
such that ![]() , where
, where ![]() is a vertex in
is a vertex in ![]() (see Figure 11.14). Because
(see Figure 11.14). Because ![]() is link-connected,
is link-connected, ![]() is non-empty and so contains a vertex
is non-empty and so contains a vertex ![]() . Define a new subdivision
. Define a new subdivision ![]() by taking the stellar subdivision of
by taking the stellar subdivision of ![]() with center
with center ![]() . Define
. Define ![]() to agree with
to agree with ![]() except that
except that ![]() . It is easy to check that
. It is easy to check that ![]() agrees with
agrees with ![]() on
on ![]() but collapses one fewer simplex than
but collapses one fewer simplex than ![]() , contradicting our assumption that
, contradicting our assumption that ![]() collapses a minimum number of simplices.
collapses a minimum number of simplices.

For the induction step, assume the claim for complexes of dimension less than ![]() . Let
. Let ![]() be an
be an ![]() -complex, and
-complex, and ![]() a continuous map that is simplicial and rigid on
a continuous map that is simplicial and rigid on ![]() . Fact 11.5.5 implies there exists a subdivision
. Fact 11.5.5 implies there exists a subdivision ![]() such that
such that ![]() and a simplicial map
and a simplicial map ![]() that agrees with
that agrees with ![]() on
on ![]() .
.
Suppose, by way of contradiction, that for every such ![]() and
and ![]() ,
, ![]() collapses a simplex of
collapses a simplex of ![]() . Pick
. Pick ![]() and
and ![]() to minimize the number of collapsed simplices. We will show how to adjust
to minimize the number of collapsed simplices. We will show how to adjust ![]() and
and ![]() to collapse one fewer simplex, a contradiction.
to collapse one fewer simplex, a contradiction.
Pick ![]() in
in ![]() such that
such that ![]() collapses
collapses ![]() to a single vertex
to a single vertex ![]() but does not collapse any simplex strictly containing
but does not collapse any simplex strictly containing ![]() . Because
. Because ![]() does not collapse any simplices in
does not collapse any simplices in ![]() ,
, ![]() for some
for some ![]() -simplex
-simplex ![]() . Because
. Because ![]() is an
is an ![]() -simplex,
-simplex, ![]() .
.
As before, pick a point ![]() in the interior of
in the interior of ![]() , and take the stellar subdivision
, and take the stellar subdivision ![]() with center
with center ![]() . Because
. Because ![]() is a manifold,
is a manifold, ![]() is an
is an ![]() -sphere, and
-sphere, and ![]() is an
is an ![]() -disk with boundary
-disk with boundary ![]() .
.
The subcomplex ![]() is
is ![]() -connected by hypothesis and link-connected by Lemma 11.5.4. Because
-connected by hypothesis and link-connected by Lemma 11.5.4. Because ![]() does not collapse any simplices strictly containing
does not collapse any simplices strictly containing ![]() ,
,
![]()
Because ![]() , we apply the induction hypothesis as follows: Because
, we apply the induction hypothesis as follows: Because ![]() is connected and link-connected, there exists a subdivision
is connected and link-connected, there exists a subdivision ![]() and simplicial map
and simplicial map
![]()
such that ![]() ,
, ![]() agrees with
agrees with ![]() on
on ![]() , and
, and ![]() does not collapse any simplices of
does not collapse any simplices of ![]() (see Figure 11.15).
(see Figure 11.15).

Because ![]() does not subdivide any simplices of
does not subdivide any simplices of ![]() , it extends to a subdivision
, it extends to a subdivision ![]() of all of
of all of ![]() . Define
. Define

Note that ![]() agrees with
agrees with ![]() on every vertex not in
on every vertex not in ![]() and on every vertex of
and on every vertex of ![]() , so
, so ![]() cannot collapse more of these simplices than
cannot collapse more of these simplices than ![]() . Moreover,
. Moreover, ![]() cannot collapse any simplices of
cannot collapse any simplices of ![]() because it is rigid by the induction hypothesis. It follows that
because it is rigid by the induction hypothesis. It follows that ![]() collapses one fewer simplex than
collapses one fewer simplex than ![]() , contradicting our assumption that
, contradicting our assumption that ![]() collapses a minimum number of simplices.
collapses a minimum number of simplices. ![]()
Lemma 11.5.7
Let ![]() be a chromatic
be a chromatic ![]() -simplex,
-simplex, ![]() a chromatic subdivision, and
a chromatic subdivision, and ![]() is a rigid simplicial map. If
is a rigid simplicial map. If ![]() is color-preserving on
is color-preserving on ![]() , then
, then ![]() is color-preserving on
is color-preserving on ![]() .
.
Proof
![]() is a manifold with boundary, so for any
is a manifold with boundary, so for any ![]() -simplex
-simplex ![]() , there is a sequence of
, there is a sequence of ![]() -simplices
-simplices ![]() , where
, where ![]() has an
has an ![]() -face on the boundary,
-face on the boundary, ![]() and
and ![]() share an
share an ![]() -face, and
-face, and ![]() .
.
We argue by induction on ![]() . When
. When ![]() , the claim is trivial. Otherwise, assume that
, the claim is trivial. Otherwise, assume that ![]() is color-preserving on
is color-preserving on ![]() . The map
. The map ![]() is color-preserving on the
is color-preserving on the ![]() face shared by
face shared by ![]() and
and ![]() . Because
. Because ![]() is rigid, it cannot send the remaining vertex of
is rigid, it cannot send the remaining vertex of ![]() to any of the other
to any of the other ![]() colors in the shared face, so it must send it to a vertex of the same color.
colors in the shared face, so it must send it to a vertex of the same color. ![]()
We are now ready to complete the proof of Lemma 11.5.3 (and hence Theorem 11.5.2). For ![]() , we inductively construct a sequence of chromatic subdivisions
, we inductively construct a sequence of chromatic subdivisions ![]() and a color-preserving simplicial map
and a color-preserving simplicial map
![]()
carried by ![]() .
.
For the base case, let ![]() send any vertex
send any vertex ![]() of
of ![]() to any vertex of
to any vertex of ![]() . This construction is well-defined because
. This construction is well-defined because ![]() is
is ![]() -connected (non-empty) by hypothesis. This map is trivially color-preserving.
-connected (non-empty) by hypothesis. This map is trivially color-preserving.
For the induction hypothesis, assume we have constructed a chromatic subdivision and color-preserving simplicial map
![]()
This simplicial map induces a continuous map that sends the boundary of each ![]() -simplex
-simplex ![]() in
in ![]() to
to ![]() . By hypothesis,
. By hypothesis, ![]() is
is ![]() -connected, so this map of the
-connected, so this map of the ![]() -sphere
-sphere ![]() can be extended to a continuous map of the
can be extended to a continuous map of the ![]() -disk
-disk ![]() :
:
![]()
These extensions agree on ![]() , so together they define a continuous map,
, so together they define a continuous map,
![]()
where for each ![]() ,
, ![]() .
.
Note that the restriction of ![]() on the
on the ![]() skeleton is just
skeleton is just ![]() , a color-preserving simplicial map, so by Lemma 11.5.6, there is a subdivision
, a color-preserving simplicial map, so by Lemma 11.5.6, there is a subdivision ![]() of
of ![]() such that
such that ![]() and a rigid simplicial map
and a rigid simplicial map ![]() extending
extending ![]() . By Lemma 11.5.7,
. By Lemma 11.5.7, ![]() is also color-preserving. These extensions agree on the
is also color-preserving. These extensions agree on the ![]() -skeleton, so together they define a color-preserving simplicial map:
-skeleton, so together they define a color-preserving simplicial map:
![]()
carried by ![]() .
.
When ![]() is a color-preserving simplicial map carried by
is a color-preserving simplicial map carried by ![]() , completing the proof.
, completing the proof.
By analogy with Corollary 11.4.22, the proof of Theorem 11.5.2 requires only that the protocol model support the immediate snapshot.
Corollary 11.5.8
Assume that for any input complex ![]() and any
and any ![]() , there is a protocol that solves the chromatic agreement task
, there is a protocol that solves the chromatic agreement task ![]() . Then a task
. Then a task ![]() has a protocol if, for each
has a protocol if, for each ![]() ,
, ![]() is
is ![]() -connected, and
-connected, and ![]() is link-connected.
is link-connected.
One interesting and useful fact that emerges from this discussion is that if two different read-write models with different adversaries have the same minimal core size, then they solve the same set of colorless tasks. In this sense, an adversary’s minimum core size completely determines its computational power for colorless tasks.
11.6 Chapter notes
The results in this chapter originally appeared in Herlihy and Shavit [91].
Herlihy, Rajsbaum, and Raynal [87] present an implementation of the safe agreement task in a layered model. See Exercise 11.1.
Mostefaoui, Rajsbaum, and Raynal [122] and Mostefaoui, Rajsbaum, Raynal, and Travers [121] study “condition-based” variations of tasks such as consensus in which the input complexes are restricted to permit ![]() -resilient layered snapshot protocols. Such tasks provide simple, natural examples of colored tasks, where processes can adopt one another’s output values but not their input values.
-resilient layered snapshot protocols. Such tasks provide simple, natural examples of colored tasks, where processes can adopt one another’s output values but not their input values.
Imbs, Rajsbaum, and Raynal [95] study generalized symmetry-breaking tasks (GSB) that include election, renaming, and other tasks that are not colorless. These are fixed-input in the sense that the only input to a process is its name.
Fact 11.5.5 is Theorem IV.2 of Glaser [72].
11.7 Exercises
Exercise 11.2
Consider the following fixed-input colored task: ![]() processes choose distinct values in the range
processes choose distinct values in the range ![]() . Prove that the output complex for this task is a manifold. (This task is a special case of the renaming task considered in the next chapter.)
. Prove that the output complex for this task is a manifold. (This task is a special case of the renaming task considered in the next chapter.)
Exercise 11.3
As a special case of Exercise 11.2, draw the output complex for the fixed-input colored task where three processes choose distinct values in the range ![]() . What is this surface called?
. What is this surface called?
Exercise 11.4
Exercise 11.5
For an ![]() -simplex
-simplex ![]() , what is the Lebesgue number of the open-star cover of
, what is the Lebesgue number of the open-star cover of ![]() ? Of
? Of ![]() ?
?
Exercise 11.6
Prove Fact 11.4.3: If ![]() is a point in
is a point in ![]() -dimensional Euclidean space, and
-dimensional Euclidean space, and ![]() is a finite set of hyperplanes, each of dimension less than
is a finite set of hyperplanes, each of dimension less than ![]() , then there is an
, then there is an ![]() such that for every
such that for every ![]() ,
, ![]() contains a point not on any hyperplane in
contains a point not on any hyperplane in ![]() .
.
Exercise 11.7
Prove Fact 11.4.4: If ![]() is a point in
is a point in ![]() -dimensional Euclidean space, and
-dimensional Euclidean space, and ![]() is a finite set of hyperplanes, each of dimension less than
is a finite set of hyperplanes, each of dimension less than ![]() , none of which contains
, none of which contains ![]() , then there is an
, then there is an ![]() such that
such that ![]() does not intersect any hyperplane in
does not intersect any hyperplane in ![]() .
.
Exercise 11.8
Prove Fact 11.4.9: A set of vertices ![]() of a complex
of a complex ![]() forms a simplex if and only if the intersection of their open stars is non-empty.
forms a simplex if and only if the intersection of their open stars is non-empty.
Exercise 11.9
Let ![]() be a geometric complex. Define the distance between two simplices
be a geometric complex. Define the distance between two simplices ![]() of
of ![]() to be
to be ![]() . Show that the Lebesgue number of the open-star cover of
. Show that the Lebesgue number of the open-star cover of ![]() is
is ![]() , taken over all pairs of simplices
, taken over all pairs of simplices ![]() in
in ![]() such that
such that ![]() .
.
1This map is a deformation retraction, a continuous deformation of the input complex’s polyhedron into the output complex’s polyhedron that leaves the output complex unchanged.