5
Integrated inductive displacement sensors for harsh industrial environments
Mohammad R. Nabavi, Vikram Chaturvedi, Johan G. Vogel, and Stoyan Nihtianov Delft University of Technology, Delft, The Netherlands
Abstract
This chapter is dedicated to eddy-current displacement sensors (ECSs)—one of the most widely used measurement techniques in harsh environments. First, in Section 5.1, we briefly discuss ECS applications in industry. In Section 5.2, the operation principle, the limitations, and important design considerations of this type of sensor are surveyed. The ECS performance limitations are addressed in Section 5.3, considering the most demanding industrial applications. Special attention is given to the excitation frequency, the design of the sensor and its electronic interface. Sections 5.4 and 5.5 provide a review of state-of-the-art ECS interfaces. The chapter ends with conclusions and design perspectives for ECS systems.
Keywords
Displacement; Eddy current; High excitation frequency; High resolution; Inductive sensor interface; Low power; Ratio-metric measurement; Stability
This chapter is dedicated to eddy-current displacement sensors (ECSs)—one of the most widely used measurement techniques in harsh environments. First, in Section 5.1, we briefly discuss ECS applications in industry. In Section 5.2, the operation principle, the limitations, and important design considerations of this type of sensor are surveyed. The ECS performance limitations are addressed in Section 5.3, considering the most demanding industrial applications. Special attention is given to the excitation frequency, the design of the sensor and its electronic interface. Sections 5.4 and 5.5 provide a review of state-of-the-art ECS interfaces. The chapter ends with conclusions and design perspectives for ECS systems.
5.1. Why inductive displacement sensors?
Displacement sensors are extensively employed in industry for measuring the position and movement of objects and for measuring other physical quantities that can be converted into movement, such as pressure, acceleration, etc. Depending on the industrial application, the preferred types of noncontact displacement sensors are optical/laser, capacitive, and inductive (eddy-current) sensors (Micro-Epsilon, 2011; Lion Precision, 2011). Incremental optical sensors, such as interferometers and encoders, provide the best accuracy/measurement range combination, but they are bulky and quite expensive because of their sophisticated structure. Capacitive and ECSs1 are preferred when the absolute position of a target needs to be measured with a limited dynamic range. These sensors are compact, robust, stable, accurate, and relatively low cost.
A closer look at the principle of operation of capacitive and ECSs reveals some similarities. Both sensors represent reactance in electrical circuits, which means that ideally they do not consume any electrical energy, and for this reason they are practically noiseless. The structure of an ECS with a flat sensing coil is similar to the structure of a capacitive sensor. Both sensors, as well as their targets, can be built using similar materials. Therefore, the difference in performance of these two sensor types can be mostly related to their sensitivity to working environment variations, the way of interaction with their targets, and the performance of the utilized electronic interfaces.

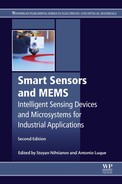
Figure 5.1 A simplified differential configuration of eddy-current sensor for measuring gas pressure.
ECSs have the potential for very precise position/displacement measurement in the micrometer and even in the nanometer range (Micro-Epsilon, 2011). Unlike capacitive sensors, eddy-current sensors are highly insensitive to variations in the working environment such as pressure, humidity, contamination. Furthermore, these sensors do not require an electric contact with the target. This is an important advantage in many applications where no contact with the target is allowed (such as measuring the position of a magnetically levitated target (Oberle et al., 2002)).
Fig. 5.1 shows an application example in which the difference between the gas pressure in gas flow 1 and gas flow 2 is the primary measurand (Nabavi and Nihtianov, 2011). The pressure difference deflects the conductive membrane positioned between the two gas flows. The target deflection causes the inductance of one sensor to increase and that of the other to decrease. Such a differential setup helps increase the sensitivity to the target movements compared to the case of employing only one sensor. An important advantage of employing an ECS here is immunity to the dielectric properties of the flowing gas.
To fully exploit the above-mentioned advantages of ECSs and to create a high-performance displacement sensor based on the eddy-current principle, their operation principle and their imperfections have to be taken into account. In the following we point out these aspects.
5.2. Principle of operation and practical limitations for eddy-current sensors
5.2.1. Sensor operation principle
An ECS measurement system usually includes a sensing coil that is in front of a metallic (conductive) target. Exciting the coil with an AC current generates an electromagnetic field. The alternating magnetic field applies Lorentz's force to the electrons in the target. This results in a flow of free electrons, i.e., circulating eddy currents, in the target, in a plane perpendicular to the direction of the magnetic field. Based on Lenz's law, the eddy currents generate a secondary magnetic field that opposes the primary excitation field, as shown in Fig. 5.2(a). The closer is the target to the coil, the higher is the density of the eddy currents. In other words, there is a magnetic field interaction between the coil and the target. This interaction can be electrically modeled using an air-core transformer in which the mutual inductance between the primary and secondary sides depends on the sensor–target distance X, as shown in Fig. 5.2(b). Because eddy currents dissipate electrical power, a parasitic series resistance is usually considered in their electrical model.

Figure 5.2 (a) Operating principle of an eddy-current sensor (ECS); (b) ECS model including an air-core transformer; and (c) simplified electrical model of an ECS (R and C are parasitic components, which should be minimized when designing the coil).
On the basis of the equivalent circuit, a simplified electrical model of the sensor is shown in Fig. 5.2(c). In the model, C represents the interwinding parasitic capacitance of the sensor, while Rp and Lp (indicated in gray in Fig. 5.2(b) and (c)) represent the parasitic contribution of the sensor connections. Expressions (5.1) and (5.2) define the equivalent inductance and series resistance of the sensor as (Tian et al., 1998):
 (5.1)
(5.1) (5.2)
(5.2)where Lc and Rc are the inductance and series resistance of the coil without a target, Lt and Rt are the inductance and series resistance of the eddy current loop, fexc is the frequency of the excitation signal, and M is the mutual inductance between the coil and the eddy current loop (see Fig. 5.2).

Figure 5.3 Measured inductance and series resistance (normalized by Lc and Rc) of a flat sensor coil for different distances X from a copper target (the right vertical axis corresponds to the dashed line curve); the fitted normalized inductance curve, shown in a solid line, is obtained from expression (5.3).
Attempts to analytically formulate the ECS displacement-inductance transfer function have been reported (Tian et al., 1998; Hitz and Welsby, 1997; Yating et al., 2005; Fericean and Droxler, 2007). However, because many parameters contribute to such analyses, they always end up with very complicated mathematics, which makes the obtaining a perception about the sensor physical behavior too difficult (Fericean and Droxler, 2007). Fig. 5.3 shows the empirically obtained dependence between the normalized inductance and parasitic series resistance (of a prototype with flat sensing coil) and the ratio α between the sensor–target distance X and the coil radius. The following exponential function is fitted to the measured data (Fig. 5.3):
where Lc is the coil inductance without the target, and a, b, and c are curve-fitting coefficients. The value of a is close to unity, which is in agreement with the fact that when the target is far away (i.e., α → ∞) the sensor inductance tends to its intrinsic value (i.e., L(α) → Lc). The parameters b and c relate to the sensor and target parameters such as shape, geometry, and material.2 The maximum deviation between the exponential fitted curve and the measured values does not exceed a few percent. When the target moves further away, the parasitic series resistance of the sensor slightly decays. This can be explained by Lenz's law: moving the target away implies a smaller secondary magnetic field and hence a smaller amount of eddy current and less dissipated energy (i.e., the equivalent sensor resistance lowers). Typically, the changes in the series resistance are negligible compared with the sensor inductance variations, as the target moves. It should be mentioned that in a design process, knowing the sensor transfer function nature facilitates the development of efficient empirical linearization algorithms/functions for ECS measurement systems.
The sensor operation principle predicts a few performance features that can potentially deteriorate its overall performance. The most important ones are discussed in the following section.
5.2.2. Limitations of eddy-current sensors
5.2.2.1. Skin effect
The intensity of the eddy currents weakens as they penetrate deeper into the target. This phenomenon is called “skin effect.” The penetration (skin) depth δ of the eddy currents is defined as:
 (5.4)
(5.4)where μ is the target permeability, σ is its conductivity, and ωexc = 2πfexc. The standard penetration depth is determined by the depth at which the eddy current intensity reaches ∼37% (i.e., 1/e) of its intensity at the target surface (see also Fig. 5.4). Table 5.1 shows the skin depth for different frequencies at room temperature for some materials typically employed in industrial applications. If δ exceeds the thickness of the target being tested, the sensitivity of the sensor drops because a considerable part of the eddy currents is lost (Roach, 1998).
Moreover, a penetration depth comparable to the thickness of the target will degrade the measurement reliability. Using the complex image method, a target with eddy currents penetrating into it can be replaced by a superconductor image plane at a complex distance of Xcx, as shown in Fig. 5.4, so that the equivalent magnetic potential (related to  ) remains the same in both cases. The parameter Xcx is obtained from (Weisshaar et al., 2002; Kang et al., 2007):
) remains the same in both cases. The parameter Xcx is obtained from (Weisshaar et al., 2002; Kang et al., 2007):

Table 5.1

where δ is the penetration depth and tt is the target thickness, as shown in Fig. 5.4. Although the complex distance Xcx may not have a physical interpretation, it helps to understand the behavior of the sensor (Nabavi, 2010). The second term in Eq. (5.5) indicates the effect of δ and tt on the sensor performance. Knowing this allows the sensor cross-sensitivities to the target thickness and the penetration depth to be approximated by:
Regarding expression (5.5), the cross-sensitivity to the target thickness can be neglected when  , which is obtained for values of δ smaller than tt/3. In practical applications, satisfying this condition helps to eliminate the measurement cross-sensitivity to a probable intervening conductive object behind the main target. It should be mentioned that this design choice also causes the eddy currents generated in the target to be maximized, which improves the sensitivity of the sensor to the position of the target X.
, which is obtained for values of δ smaller than tt/3. In practical applications, satisfying this condition helps to eliminate the measurement cross-sensitivity to a probable intervening conductive object behind the main target. It should be mentioned that this design choice also causes the eddy currents generated in the target to be maximized, which improves the sensitivity of the sensor to the position of the target X.
It is important to mention that the cross-sensitivity to the target electrical parameters also has to be taken into account in precision measurements. As an example, the cross-sensitivity to the target temperature is given by (using expression 5.7):
where ρ is the target resistivity and γ is the temperature coefficient of the target resistivity. Expression (5.8) presents a fundamental maximum design value for δ, which keeps the resulting temperature drifts within a desired stability budget (provided that the electronic interface is ideally thermally stable).
5.2.2.2. Parasitic effects
In addition to the sensing coil main parameter, which is the inductance, inevitable parasitic components, such as the coil intrinsic series resistance, the interwinding capacitance, and the parasitics originating from the electrical connection between the sensor and the interface electronics, contribute to the measurement result. However, in most practical cases the parasitics can be tolerated if they do not deteriorate the measurement resolution and/or stability. This implies that firstly they have to be minimized, and secondly their variations (e.g., with temperature) have to be within the design error budget.
Because of the capacitive coupling between the windings of the coil, an inevitable interwinding parasitic capacitance appears in the sensor model (see Fig. 5.2(c)). It should be mentioned that structures such as multilayer coils or densely wound coils introduce an increased parasitic capacitance value. With the increase of the sensor excitation frequency, the parasitic capacitor can short-circuit the sensor inductance, which causes the sensor sensitivity to drop. The excitation frequency requirements lead to important design considerations of the sensor (and also of the interface) particularly in precision applications. These considerations are further discussed in Section 5.3.
5.2.2.3. Limited sensing coil quality factor
As shown in Figs. 5.2(c) and 5.3, the sensor suffers from a parasitic series resistance.3 This resistance limits the sensor quality factor Q and hence the filtering effect against external interferences. Regarding Eqs. (5.1) and (5.2) the quality factor Q can be expressed by:
 (5.9)
(5.9)A sufficiently high excitation frequency improves the quality factor of the sensor and helps detecting a small inductance variation in the presence of a parasitic series resistance.4
5.2.2.4. Frequency dependence
Expressions (5.1) and (5.2) indicate a frequency dependence of the equivalent inductance and resistance of the sensing coil. This effect introduces a cross-sensitivity to a variation of the excitation frequency. However, provided that fexc → ∞, we can write (Tian et al., 1998):
Expression (5.10) shows that increasing fexc helps to lower the unwanted cross-sensitivity to the excitation frequency variations.
5.3. Design requirements in precision industrial applications
According to the above-mentioned analyses, increasing the excitation frequency of the ECS can play an important role in advanced industrial applications. Examples for such applications are measuring the position of a thin conductive membrane and/or operation in a harsh environment with a limited temperature control. An example of design requirements, dictated by these kinds of applications, is given next.
- 1. With respect to the design criterion δ ≤ tt/3, the use of a 100-μm thick copper/aluminum target results in an excitation frequency of ∼10 MHz.
- 2. Based on expression (5.8), a thermal instability budget of the ECS of ×10 nm/°C (using a copper/aluminum target) requires ∼20 MHz excitation frequency, which is more than one order of magnitude higher than the maximum popular values (of a few MHz).5
However, increasing the excitation frequency when using a typical densely wound coil is problematic because its relatively large parasitic capacitance (see Figs. 5.2(c) and 5.5(a)) shorts the inductance of the sensor as fexc increases. Flat coils with fewer turns and sufficient distance between their turns are preferred because their associated parasitic capacitance is quite limited. Moreover, such coils with a flat structure are volume-efficient and have an improved mechanical stability. However, for a given sensor area, this kind of sensor offers a very limited inductance (e.g., ×10 nH). To avoid the relatively large parasitic inductance of a connection cable, which will appear in series of the small sensor inductance, integrating the sensor and the interface or assembling them in one package is indispensable (see Figs. 5.2(b,c) and 5.5(b)). In Appendix 5.A more details are presented about the sensing coil design aspects.
It is important to point out that increasing fexc and utilizing a flat coil with a very small series resistance R (e.g., ×10 mΩ) considerably enhances the sensor quality factor (Q ∝ fexc, R−1). Improving Q factor along with removing the connection cables and integrating the sensor and the interface improves the measurement immunity to stray magnetic fields (Fig. 5.5(b)). This is particularly important in harsh industrial environments.
Integrating the sensor and the interface, along with applying an increased fexc, promises a considerable performance enhancement at system level; however, it also introduces challenges to the interface electronics. Operating with a higher excitation frequency implies an increase in the power consumption of the interface, which is needed to achieve a given resolution, stability, and signal bandwidth. High power consumption is associated with increased heat generation, causing an increase in the sensor temperature and hence thermal drift of the output signal. Furthermore, introducing a local heat source is unacceptable in many working environments. Because of the fundamental trade-offs in the integrated circuits technology between power consumption, operating frequency, stability, and resolution, achieving a high performance at a higher fexc becomes challenging. In Sections 5.4 are discussed the latest advances in ECS interfaces, to conceptualize the pros and cons of the existing ECS design concepts.

Figure 5.5 An eddy-current sensor system with functional blocks: (a) conventional realization (not compatible with high excitation frequency required in advanced applications) and (b) state-of-the-art implementation with a low-power integrated interface (suitable for high-frequency and high-precision operation).
5.4. State-of-the-art eddy-current sensor interfaces
Fig. 5.6 shows the standard architecture of an ECS interface. The first stage excites the sensor, and the sensor inductance (as a function of the target position) modulates the excitation signal. Most often a frequency modulation (FM) or an amplitude modulation (AM) is used (Limanov, 1966). A front-end stage (e.g., voltage or current amplifier) conditions the information-carrying signal before supplying it to the following stages. The next stage demodulates the displacement information to the base band (BB). Eventually, an analog-to-digital converter (ADC) digitizes the displacement information and applies it to a microprocessor for data processing (or in some applications to a radio interface for data transmission). It is noteworthy that depending on the implementation method, a number of the functions may be combined in a single circuit.

Figure 5.6 Standard functional diagram of an eddy-current sensor interface. ADC, analog-to-digital converter.
Because the sensor impedance can be very limited (e.g., a few ohms at 20 MHz excitation frequency), employing conventional impedance measurement approaches, such as two-port measurement, is not feasible. More specifically, such limited impedance generates a very small signal at a relatively high frequency. The result of this is increased power consumption of the conventional signal conditioning solutions.
A more power-efficient alternative to interface an ECS is to use the sensing coil as part of a resonator or an oscillator (Oberle et al., 2002; Goezinne, 2005; Thoss et al., 2007; Chen and Ding, 2007). A number of recently reported ECS interfaces employ this approach. They are evaluated in the next subsections. The leading assessment criterion is the potential of the interface to use a high sensor excitation frequency (in the ×10 MHz range). This undoubtedly relates to the method of exciting the sensor, which is a critical design decision in any ECS system (Nabavi and Nihtianov, 2012).
5.4.1. Utilizing external switched-capacitor oscillator and LC resonator
Oberle et al. in 2002 propose a power-efficient ECS interface (for a differential 2D displacement measurement system), which operates at ×100 kHz excitation frequency. A switched-capacitor (SC) oscillator is employed to generate an approximation of a sine wave of 312.5 kHz (a pseudo sine wave), as shown in Fig. 5.7, to excite the coils.
The levels of the excitation signal are determined by Vref and the variable gain of the SC integrator. To generate the 312.5 kHz excitation frequency, which is slightly below the minimum expected resonant frequency of the sensor (circuit) network, the switching operation is performed at 5 MHz rate. This signal generator consumes more than 4 mW. It also uses an auto-zero (AZ) mode of operation to suppress the effect of its amplifier offset and hence the drift of the generated excitation signal (Enz and Temes, 1996). The pseudo sine wave is applied to the sensor network, which also acts as a band-pass filter (suppressing the excitation signal harmonics). The signal amplitude is modulated by the sensor impedance and amplified using the instrumentation amplifier stage. To demodulate and digitize the displacement information, the sensor signal is applied to a following mixer and a ΔΣ ADC. A dynamic range of 10 bits and a signal bandwidth of 10 kHz, with a low-power dissipation of 10 mW, are reported using this interface design method.

Figure 5.7 Functional block diagram of the interface using an SC oscillator for sensor excitation (with fexc in ×100 kHz range) (Oberle et al., 2002). ADC, analog-to-digital converter; SC, switched-capacitor.
However, extrapolating to 20 MHz excitation frequency, the SC oscillator would require a switching frequency of above 350 MHz. Such a high frequency leads to a higher power consumption and may cause undesired cross-talk (e.g., between the channels of a multisensor interface or differential setups, like the one shown in Fig. 5.1). Moreover, implementing so many active blocks operating at high frequency results in significant increase of the power dissipation, which is not acceptable in power-efficient applications.
5.4.2. Relaxation oscillator-based interface
In Kejik et al. (2004) a high excitation frequency ECS interface is reported using the self-oscillation principle. In this interface, as illustrated in Fig. 5.8, a relaxation oscillator is employed whose output frequency is modulated by the target displacement. The time constant of the positive feedback network depends on the sensor inductance and therefore the inductance variations modulate the oscillation frequency. It is reported that the excitation frequency varies from 10 to 30 MHz, depending on the target position. In this design, because of the sensitivity of the time constant to the temperature, a compensation RC network in the negative feedback path of the amplifier, along with a temperature-controlled biasing current, is employed. The output frequency is measured by a counter to determine the sensor inductance. An advantage of this approach is its simplicity while it achieves a good dynamic range of more than 12 bits.

Figure 5.8 Interface implemented in Kejik et al. (2004).
Although the excitation frequency is in the desired range, the reported power consumption of 100 mW is too high for many applications. One reason for using so much power is the lack of an LC resonator network and hence the lack of boosting of the low sensor impedance, which is in the few tens of Ω range. Therefore, a considerable amount of current is required to drive the sensor with such a small impedance at a relatively high excitation frequency.
It is necessary to mention that FM is not the preferred choice for an ECS system. When using this modulation principle, most often for reasons related to the desired dynamic range, the interface has to be designed in such a way that the frequency varies within a relatively wide range as the target moves (±50% frequency change reported in Kejik et al., 2004). Such a wide frequency variation significantly changes the penetration depth of the eddy currents in the target (Vyroubal, 2009). Therefore, an additional nonlinearity in the sensor transfer function will appear because of the nonlinear relation between fexc and δ (Xcx) (see also expression 3.5). AM modulation with limited frequency variation is the preferred solution to avoid further deterioration of the sensor linearity.
5.5. Eddy-current sensor interfaces with LC oscillator and ratiometric measurement
A front-end stage including an LC oscillator (depicted in Fig. 5.9) has been proposed in Nabavi and Nihtianov (2009). The stage utilizes two differentially connected sensors that are excited by the oscillator signal at 20 MHz  . It is also possible to utilize only one sensing coil, while the other coil is used as a reference, but then a similar nonlinearity problem to the previously discussed interface in Section 3.4.2 occurs. The sensor inductances in differential mode modulate mainly the amplitude of the oscillator output signals. Although two inductors with basically different values are utilized, only one oscillation frequency appears because in this front-end stage only a single resonator is formed.
. It is also possible to utilize only one sensing coil, while the other coil is used as a reference, but then a similar nonlinearity problem to the previously discussed interface in Section 3.4.2 occurs. The sensor inductances in differential mode modulate mainly the amplitude of the oscillator output signals. Although two inductors with basically different values are utilized, only one oscillation frequency appears because in this front-end stage only a single resonator is formed.

An important feature of this circuit is that the noise levels at both outputs originating from the Gm stage are correlated. This property can be utilized for noise suppression operation. Because in the vicinity of the oscillation frequency the AC current is trapped in the resonator, both coils experience the same current iac (Nabavi and Nihtianov, 2011). This implies that iac, together with the noise and drift associated with this current, modulates the amplitude of both output signals in identical multiplicative way, which results in a correlated multiplicative error. A similar conclusion can be drawn for the temperature dependence of the sensing coils (Nabavi and Nihtianov, 2011)—in a first-order analysis, similar thermal expansion coefficients are added to the values of both sensing inductances. Because of the multiplicative nature of the discussed disturbing factors, utilizing a ratiometric measurement can significantly enhance the measurement resolution and the stability performance. The ratiometric function is defined as:
It is notable that by using this readout function, the linearity of the differential system is preserved and the transfer characteristic looks like very much to the one of a conventional differential measurement system (because |VO1| + |VO2| ≈ cte as the target moves), as illustrated in Fig. 5.10.
However, to exploit the high performance promised by this front-end stage and the ratiometric measurement, a power-efficient, low-offset, and linear demodulation has to be performed. A straightforward approach is to utilize a high-speed ADC (e.g., faster than 40 MS/s) and to extract the oscillator output amplitudes in the digital domain. However, such a fast ADC consumes a considerable amount of power, which is not acceptable in a low-power ECS application. Next we discuss alternative demodulation solutions that can be adapted for the front-end stage and the ratiometric measurement.

5.5.1. Precision peak detection-based eddy-current sensor interface
Peak detectors employing p-n junction diodes are well-known means for AM demodulation (Carlson, 2002). However, because of the temperature dependence of the I–V characteristic of the p-n junctions, such peak detectors are associated with significant signal-dependent thermal drifts (Nabavi and Nihtianov, 2009; Meyer, 1995). To circumvent this problem, an amplifier (or comparator) can substitute the p-n junction, as depicted in Fig. 5.11 (Park et al., 2006). In this circuit, the amplifier compares the input signal with the capacitor voltage so that if the input voltage is greater than the capacitor voltage, the amplifier turns on the switch to further charge the capacitor. Consequently, the hold capacitor Chold is charged such that the output voltage becomes equal to the input voltage peaks. To follow the input peaks when the input signal amplitude decreases, a small current source in parallel with the capacitor can be considered to discharge it.
Using this principle, Fig. 5.12(a) shows a demodulator that is adapted for the front-end stage depicted in Fig. 5.9. The demodulator employs three channels, including precision peak detectors followed by low-pass filters (which also act as buffers). A dedicated switched-channel operation (similar to the dynamic element matching method) is utilized to suppress the effect of associated offsets originating from mismatches in the channels. With this technique each operation cycle involves six switching phases, in which the oscillator output voltages (A, B, and CM in Fig. 5.9) are sequentially interchanged between the inputs of the demodulator channels. At each phase two channels are connected to the oscillator outputs, while the third one detects the common mode voltage of the oscillator outputs (node CM; see Fig. 5.12(b)). In this way the effect of oscillator power supply drift is canceled out. An ADC, which is synchronized with this operation, converts the demodulator analog outputs into digital codes for postprocessing, including the formation of the ratiometric function. The ratiometric readout function at the end of each phase is defined as:
where VA, VB, and VCM are the voltages at the corresponding nodes in Fig. 5.9. If the offsets of the channels are taken into account, one can write:


Figure 5.12 (a) Conceptual illustration of the precision peak detection-based eddy-current sensor system adapted for the front-end LC oscillator (Fig. 5.9), which utilizes a switched-channel offset cancellation operation; (b) switching diagram of the offset cancellation operation. ADC, analog-to-digital converter.
where VoffsetI, VoffsetII, and VoffsetIII are the total input-referred offsets (and low-frequency noise) of the corresponding channels depicted in Fig. 5.12(b). With offsets in the range of a few mV and oscillator output voltages above a few hundred mV, expression (5.13) can be modified, using the Taylor series expansion, to:
 (5.14)
(5.14)and at phase Φ2 we have:
 (5.15)
(5.15)Likewise:
 (5.16)
(5.16) (5.17)
(5.17) (5.18)
(5.18) (5.19)
(5.19)The sum of expressions (5.14)–(5.19) is free of offset voltages. Mathematically, one can consider the output function of the demodulator as:
 (5.20)
(5.20)Obviously, the average of the outputs after six (or a multiple of six) consecutive phases will be free of offsets. It will be also free from the low-frequency 1/f noise, if the rate of offset cancellation operation is higher than the 1/f corner frequency. Note that the averaging parameter g can be increased to further suppress the thermal noise at the cost of a larger measurement time.
Since the only high-frequency block in the demodulator is an amplifier that drives a very small load (gate of an MOS switch), the power consumption in this approach is relatively low. This solution has been realized with a power consumption of less than 10 mW and a signal bandwidth of a few kHz (Nabavi and Nihtianov, 2011). It is necessary to mention that in this approach the demodulator requires a relatively wide bandwidth (e.g., ×100 kHz) to perform the offset cancellation operation, which causes the associated noise bandwidth to increase. As a consequence, the obtained resolution is in the medium range (∼12 bits). This interface approach is a proper candidate for applications with medium resolution, small penetration depth (due to utilizing fexc of 20 MHz), and a relatively low power consumption budget.
5.5.2. Trade-offs in mixer-based interfaces
An alternative signal conditioning approach is to utilize a mixer-based demodulator, adapted for the front-end LC oscillator and the ratiometric measurement. In principle, using mixers enables operation in the frequency domain (rather than the time domain, as in peak detectors), which helps to discriminate the frequency bands. This allows the interface to filter out the out-of-band noise (along with external interferences) more efficiently.
To make the ratiometric measurement effective on noise suppression, the demodulator (more specifically the mixer) should be sufficiently linear. Furthermore, in addition to noise considerations, the associated low-frequency errors including drifts and 1/f noise have to be suppressed for stability reasons.
Figs. 5.13 and 5.14 show two alternative solutions for the ECS interface. The first solution performs the mixing operation in the analog domain in such a way that the input signal is mixed with a signal frequency that is a replica of the oscillation frequency (direct conversion). Using the Dout readout function, common mode multiplicative errors that can be introduced by the mixers are eventually suppressed, which makes this solution compatible with the ratiometric measurement method. An imperfection is the offset introduced by the mixers (due to the associated self-mixing effect and charge injection Razavi, 1998) and the amplifiers (due to mismatches). Provided that an effective offset cancellation operation is performed, this demodulation approach can be the most power-efficient way to realize a high-resolution ECS interface.

Figure 5.13 Synchronous detection-based interface with a system-level compensation for the offset originated from the self-mixing effect and the mismatches in amplifier.

Figure 5.14 Eddy-current sensor interface using band-pass ΔƩ converter (a typical choice is fs = 4fosc where fs is the analog-to-digital converter (ADC) sampling frequency).
Alternatively, a band-pass ΔƩ converter can be employed to directly digitize the narrow-band sensor information that is modulated by the high-frequency carrier signal (Fig. 5.14). The operation principle of the band-pass ΔƩ modulator is based on oversampling and noise shaping, which is similar to its low-pass counterpart (Schreier and Temes, 2005). From a system-level point of view, the main difference is that in a low pass ΔƩ modulator the noise transfer function has zero(s) at DC, whereas a band-pass modulator requires zeros at the input frequency so that the noise at this frequency range can be shaped. The output bitstream of the ΔƩ ADC is applied to a digital mixer to demodulate the AM signal in the digital domain. The signal is then applied to a decimation filter to extract the BB information and to form the ratiometric readout function.
The advantage of this solution is its immunity to DC errors because this type of data converter inherently offers a band-pass characteristic and the mixing operation is performed in the digital domain. However, the power dissipation of this approach is relatively high because of the power needed to provide the noise-shaping characteristic (using active resonators) at a relatively high frequency. More specifically, an overview of state-of-the-art band-pass converters with ×10 MHz carrier frequency, a dynamic range above 15 bits, and a signal bandwidth of a few kHz shows that the power consumption is in the order of several tens of mW (Silva et al., 2007; Yamamoto et al., 2008), which is too high for an integrated ECS interface in most applications. One solution for this issue is first to down-convert the signal to a lower intermediate frequency band (low-IF) and then to apply the signal to a low-IF band-pass ΔƩ modulator. Although low-IF ΔƩ converters consume a significantly lower amount of power, the interface still requires a preceding linear analog mixer (like in the synchronous detection approach). This implies that if both resolution and power consumption are the leading factors in an ECS interface, then the use of a linear low-noise and power-efficient analog mixer is inevitable.
5.5.3. Synchronous detection-based eddy-current sensor interface
Based on the demodulation approach shown in Fig. 5.13, we present two sensor interface solutions depending on the input displacement range.
5.5.3.1. Sensor interface for mm-range displacement measurement
A simplified architecture of the ECS interface proposed in Nabavi et al. (2013) (including two channels) is depicted in Fig. 5.15. Two differential coils sense the displacement of the target whose moving range is comparable with the sensor radius. The front-end LC oscillator excites the sensors and is followed by the V–I converters (Gmt) and the mixers. Performing the mixing operation in the current domain provides more linearity (than in the voltage domain) because the series on resistance of the switches cannot introduce distortion to a current signal. Accordingly, the output voltages of the front-end oscillator are converted into fully differential output currents using two transconductance stages Gmt. These stages are capacitively coupled to the oscillator, both to eliminate the DC component of the oscillator outputs and to allow adjustment of the input DC voltage Vadj at the desired level. The output currents of the Gmt stages are capacitively coupled to passive mixers (or choppers) to demodulate the displacement information. This capacitive coupling prevents any DC output currents from being up-converted by the mixers. This helps to reduce the high-frequency ripples at the output of the demodulator. To synchronize the demodulation with the oscillation frequency, the mixers are driven by a comparator that detects the polarity of the oscillator differential output voltage. Any offset of this comparator appears as a common mode multiplicative error, which is suppressed by the ratiometric measurement.

Figure 5.15 Simplified circuit diagram of the synchronous detection-based eddy-current sensor interface adapted for ratiometric measurement (Nabavi et al., 2013). AZ, auto-zero; TIA, transimpedance amplifier.
Two transimpedance amplifier (TIA) stages convert the demodulated currents into output voltages and prefilter the high-frequency ripples. The outputs are applied to off-chip RC filters that further limit the bandwidth to a few kHz, which is in line with the signal bandwidth of interest. Finally, the outputs are digitized by an external ADC, after which the ratiometric calculation is performed in the digital domain.
As mentioned above, to improve the stability of the interface, it is necessary to suppress the effect of low-frequency errors. One source of these errors is the charge injection by the switches in the passive mixers. Because these switches are working at the virtual grounds of the TIAs, the charge injection appears mostly (to the first-order analysis) as a common mode effect that is suppressed at the differential outputs of the TIA stages.
To eliminate the differential component of the charge injection (due to mismatch of the switches) and the self-mixing offset and the offset and the 1/f noise of the opamps in the TIAs, an AZ mode is employed. In this mode, by disabling the outputs of the Gmt stages, no input signal is applied to the passive mixers. At the same time, the mixers are still driven by the comparator. Therefore, the outputs of the TIA stages correspond to the residual charge injection of the switches and the opamp offsets. This auto-zeroing operation is repeated every 50 ms so that the low-frequency errors can be measured at the outputs and subtracted from subsequent measurements.
This interface achieves a dynamic range of more than 15 bits (better than 100 nm resolution with 3 mm full displacement scale range) with 1 kHz bandwidth, 30 ppm/°C thermal drift, 18 mW power consumption, and an excitation frequency of 20 MHz, using a standard 0.35 μm Si/Ge BiCMOS technology. It is shown that the utilized AZ operation can improve the measurement stability performance by 2–3 bits. This interface is a suitable choice for high-performance demanding applications in which the power budget is slightly relaxed.
5.5.3.2. Sensor interface for μm-range displacement measurement
In many advanced applications, there is a considerable sensor–target distance offset Xso on top of a relatively small displacement range. In Chaturvedi et al. (2017) a design concept has been employed using a single sensing coil and a reference coil. The reference coil is used to remove the impact of the distance offset and also to perform the ratiometric measurement. This helps significantly to relax the noise requirements.
The architecture of the two-channel ECS interface is shown in Fig. 5.16. Similarly, to the solution shown in Fig. 5.15, its front-end consists of a cross-coupled oscillator, which excites a reference coil Lref and a sensor coil Lsen = Lref ± ΔL(x). The amplitude of the oscillator outputs Vsen and Vref is then directly proportional to Lsen and Lref, respectively. To mitigate the sensor distance offset, the oscillator outputs are converted to currents by capacitors Cin = Cdrr = 500 fF, demodulated by mixer Mix1, and summed at the virtual ground of a TIA. This causes the effective input current of Mix1 to be proportional to ±ΔL(x), rather than Lref ± ΔL(x). To enable a ratiometric computation of displacement (Nabavi et al., 2013), Vref is demodulated by a reference channel, consisting of Cref (=β.Cin), Mix0, and TIA (denoted by Gm,ref). The scale factor β corresponds to the desired measurement range Xmax, i.e., β = Xmax/Xso = 1/10. The mixer's synchronous clock fmix (=fexc) is generated by a continuous time current comparator whose virtual ground is driven by the oscillator output via capacitor Ccomp (=200 fF). At fexc = 126 MHz, the comparator's ≈ 0.4 ns delay causes ∼5% signal attenuation. Because of their high-frequency operation, the charge injection of mixers Mix1 and Mix0 would cause significant residual offset. This is mitigated by a nested-chopping scheme operating at fmix/4096. It is notable that the excitation frequency above 100 MHz significantly reduces the skin depth, which in turn lowers the cross-sensitivity to the undesired target characteristics (see Section 5.2.2.1).

Figure 5.16 Architecture of the synchronous detection-based eddy-current sensor interface employing sensor offset cancellation. ADC, analog-to-digital converter.
In a realized demonstrator, the output of the two TIAs is buffered (not shown in Fig. 5.16) and then digitized by off-chip ADCs. The sensor consists of two flat coils implemented in the top and bottom layer of a custom four-layer printed circiut board (PCB). Each coil consists of four, 35 μm thick, turns with a 200 μm pitch and an 8 mm outer diameter. The coils are shielded from each other by two ground planes. Their distance to the moving and reference targets is established by a number of 10 μm stainless steel spacers (placed 3 mm away from the coils so as not to affect their sensitivity). With a copper target and Xso = 105 μm, the total inductance of Lref is ≈ 100 nH (including PCB trace parasitic inductance of ≈20 nH).
In a 2 kHz BW, the calculated SNR is 86.6 dB, which corresponds to a resolution of 14.1 bits over Xmax (=10 μm), i.e., a resolution of 0.6 nm, using a standard 0.18 μm CMOS technology.
5.6. Summary and design perspectives
In this chapter key design aspects for eddy-current displacement sensors and interfaces were discussed. Furthermore, design challenges related to the design of the sensor and the electronic interface were analyzed and explained. Recent advances in this field were reviewed, compared, and categorized to provide the reader with a clear design perspective. The key design points along with the contents of the chapter can be summarized as follows:
- • The distance to the target sensed by ECSs is defined by three factors: the real sensor–target distance, the eddy currents penetration depth, and the target thickness.
- • To suppress the imperfections of ECSs (in particular in precision industrial applications) it is essential to increase the excitation frequency by more than one order of magnitude in comparison to currently popular values of a few MHz. To this end, integrating the sensor and the electronic interface is indispensable.
- • The state-of-the-art ECS interfaces are surveyed and their pros and cons are discussed. Table 5.2 provides a qualitative comparison of their performance area.
- • Employing second-order LC cross-coupled oscillators is shown to be the most power-efficient way of exciting relatively high-quality factor ECSs.
- • It is revealed that ratiometric measurement can effectively improve the resolution/stability performance of the interface when using a cross-coupled LC oscillator as the front-end stage.
- • It is identified that the synchronous detection approach adapted for an LC front-end oscillator and the ratiometric measurement can be the most power-efficient way to realize a high-performance ECS interface.
Table 5.2
| Specificationsinterface realization method | LC resonator with switched-capacitor oscillator (Oberle et al., 2002) | Relaxation oscillator (Kejik et al., 2004) | LC oscillator with ratiometric and precision peak detection (Nabavi and Nihtianov, 2011) | LC oscillator with ratiometric and synchronous detection (Nabavi et al., 2013; Chaturvedi et al., 2017) |
|---|---|---|---|---|
| Excitation frequency | Low | High | High | High |
| Dynamic range | Low-medium | Medium-high | Medium | High |
| Power consumption | Low | High | Low | Low-medium |
| Bandwidth | High | Medium | Medium | Medium |
| Stability | Low-medium | Medium | Medium | High |

Appendix
5.A. Sensing coil design aspects
Typically, various requirements are relevant for the design of the ECS coil, such as compactness and manufacturability. The electronics puts requirements on the ECS coil regarding the inductance, quality factor, and self-resonance frequency (SRF). In the following, the influence of the coil design parameters on each of these properties is introduced.
5.A.1. Inductance
To attain high sensitivity, the ECS is operated at a low nominal standoff from the conductive target and at a high excitation frequency, both decreasing the nominal inductance of the coil. Assuming an LC oscillator as the front-end stage, the electronic interface requires a certain inductance to yield in combination with the on-chip capacitance and the desired oscillation frequency (Chaturvedi et al., 2017). The novel ECS design makes use of a nominal inductance of 50 nH.
The inductance that can be obtained with a straight conductor is proportional to the conductor's length. When changing the shape of the conductor into a spiral (i.e., an Archimedean coil), turns are formed, which carry current in the same direction, thus increasing the coil's inductance as a result of the mutual inductance of the turns. In this way it is possible to reduce the inductor's length and thus its SRF (Section 5.A.3), while keeping the required inductance.
At high excitation frequencies (e.g., 200 MHz), the effect of the eddy currents induced in a target by an inductor can be approximated by omitting the target and adding an identical inductor that is mirrored with respect to the surface of the target and carries an equal current in opposite direction. This leads to a shielding effect: the magnetic field is retained in the volume close to the coil and the target. This effect also shields the individual turns from each other when the standoff distance between the coil and the target is relatively small compared to the pitch of the windings. In that case, the mutual inductance between the windings decreases, ultimately leading to a coil inductance close to that of a straight inductor of equal length.

Analytic methods for calculating a coil's inductance are of interest, as they could provide more insight and allow for fast computation. The benefits of the analytic methods in literature are, however, limited. The method of Dodd and Deeds (1968) does, for example, only take into account the skin effect in the target and not in the coil for coils with a single turn or collocated turns (Vogel and Nihtianov, 2016a). Still, the analytic expressions are relatively complicated, as they involve multiple nested integrations and need to be evaluated numerically.
Alternatively, the coils can be modeled using finite element methods. However, meshing in such models is an issue because of the typically large aspect ratios. This is because the coil diameters are typically several millimeters, whereas the coil thicknesses and standoffs are in the order of tens of micrometers and the skin depths are in the order of micrometers. These problems can be solved by, for example, adopting a 2D axisymmetric model instead of a 3D model to decrease the required number of finite elements (Fig. 5.17) and modeling only the boundaries of the conductors (impedance boundaries). The latter is a valid approximation if the conductor thickness is high enough compared to the skin depth.
5.A.2. Quality factor
The coil's quality factor is defined by the coil's reactance over its resistance (Eq. 5.9). The quality factor needs to be sufficiently high (e.g., 10) amongst others to limit the noise of the electronic readout. The quality factor is primarily influenced by the excitation frequency and the standoff; it increases with the excitation frequency but decreases with decreasing standoff. The quality factor is relatively insensitive to the coil's geometry if the dimensions of the coil's cross-section are much larger than the skin depth of the coil.
5.A.3. Self-resonance frequency
The coil can be modeled as a parallel connection of an inductor and a capacitor. The capacitance of the coil is formed by the interwinding capacitance and, in the neighborhood of a conductive target, the interwinding capacitance via the target. As such, the coil itself forms a resonator with an SRF according to:
where L and C are the lumped inductance and capacitance of the sensor, respectively. Because the coil's capacitance can degrade the sensitivity of the ECS, the SRF must be sufficiently larger than the intended oscillation frequency in the front-end stage, for example, a factor of 10 larger.
To investigate the effect of the coil's geometry and standoff on the SRF, the SRF was calculated using finite element models for various coil geometries and standoffs (Vogel and Nihtianov, 2016b). In total 95 coils were studied, with a number of turns Nturn between 2 and 9, an outer radius ro between 1 and 3 mm, a trace width t between 0.1 and 0.4 mm, a trace spacing s also between 0.1 and 0.4 mm, and a standoff from the electrically floating copper target between 10 and 100 μm.
Fig. 5.18 presents the ratio between the SRFs of the coils calculated using a 2D axisymmetric and a 3D finite element model. The deviation between the models is larger for coils with a lower number of turns and operating at lower standoff. The deviation is likely caused by the inherent simplifying assumptions of the 2D model regarding the distribution of the capacitive and inductive effects.
Fig. 5.19 shows the SRFs of six randomly chosen coils as function of standoff. The envelope of the SRFs for all 95 coils is shown in gray. The SRFs are normalized by the corresponding SRFs at infinite standoff (no target present). The SRFs at standoffs between 10 and 100 μm are larger than at infinite standoff but relatively constant within this standoff range.
For calculating the SRF of a coil, different expressions have been presented (Yun et al., 2014; Hooker et al., 2015). These expressions, however, assume different coil geometries and do not take into account the presence of a conductive target. An expression of similar form to the one in Yun et al. (2014) was fitted to the SRFs (in Hz) using the 95 studied coils at a standoff of 50 μm:

Figure 5.18 Ratio between the self-resonance frequencies (SRFs) of the coil as modeled using a 2D axisymmetric and a 3D finite element model. The 2D model typically yields higher SRFs than the 3D model, especially at coils with a low number of turns and a low standoff from the conductive target.

Figure 5.19 The self-resonance frequencies (SRFs) of 6 out of the 95 coils as a function of standoff, normalized by their SRFs at infinite standoff (i.e., no target present). The envelope of the SRFs for all 95 coils is shown shaded. For the studied coils, the SRF is relatively constant over the standoff in the range from 10 to 100 μm.
where lwire = πN(ro + ri) is the approximate length of the coil's wire, ro and ri are the nominal outer and inner radii, respectively, and
is the speed of light in the surroundings of the coil, with c the speed of light in vacuum. The unit of w, s, and lwire is meter, whereas that of vlight is meter per second. The expression yields a root mean square (RMS) deviation below 3% for the SRFs to which it was fitted (standoff of 50 μm). The deviation for the other standoffs between 10 and 100 μm is below 6% RMS.
Conventionally, it is assumed that the coil is suspended in air, which has a relative permittivity εr of 1. However, in a practical probe design this is not realistic. The common PCB material FR4, for example, has a relative permittivity around 4.4. Ceramic materials, which are from a mechanical stability point of view desirable, have higher relative permittivities in the order of 8. This leads, according to Eq. (3.23), to a lower speed of light in the probe material, reducing the SRF.
The influence of the probe material on the SRF can be accounted for by using an effective permittivity. The effective permittivity is not only a function of the probe material but also of the standoff and the coil geometry. As a first guess, the mean permittivity of the probe and the air gap could be used (Hooker et al., 2015), although this does not take into account the presence of the conductive target.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.