2
Interfacing sensors to microcontrollers
a direct approach
Abstract
This chapter discusses the direct connection of analog sensors to digital systems without using any analog circuit in the signal path. It first reviews the operating principle of analog sensors (mainly, resistive and capacitive sensors) and digital systems (basically, microcontrollers). It then explains how to connect different sensor topologies to a microcontroller to build a direct interface circuit. Finally, it discusses some applications using commercial devices.
Keywords
Capacitive sensor; Microcontroller; Resistive sensor; Sensor electronic interface
2.1. Introduction
Just as human beings acquire information from their environment through their senses and process such information using their brain, electronic systems try to do the same by means of sensors and processing digital devices such as microcontrollers (μC) or microprocessors (μP). Nowadays, sensors and processing devices have become essential for the smooth running of our lives and they are present everywhere: industry, automobiles, aircrafts, medical devices, consumer electronics, and home appliances, among others.
The classic block diagram of a sensor electronic interface is shown in Fig. 2.1(a) (Pallàs-Areny and Webster, 2001). First, information about the measurand (e.g., temperature) is converted to the electrical domain by means of the sensor, which usually provides an analog electrical signal of low amplitude that carries some noise. Afterward, the signal conditioning circuit, which generally relies on operational amplifiers, performs some or all of the following tasks in the analog domain: sensor output-to-voltage conversion, amplification, filtering, linearization, and/or demodulation. The resulting analog signal is then digitized via an analog-to-digital converter (ADC). Finally, a digital system (e.g., a μC) acquires, stores, processes, controls, communicates (to other devices or systems), and/or displays the digital value with information about the measurand.

Thanks to the rapid advances in integrated circuit (IC) technologies, nowadays several blocks shown in Fig. 2.1(a) can be integrated into the same chip. There are commercially available ICs that integrate the processing digital system, the ADC and/or a signal conditioning circuit (for instance, MSC1210 from Texas Instruments). There are also commercial ICs that integrate the sensor, its signal conditioning circuit, and/or the ADC (e.g., ADXL103 and ADXL312 accelerometers from Analog Devices); such chips are usually known as integrated smart sensors (Huising, 2008). Other commercial ICs integrate the required signal conditioning circuit and the ADC to measure a specific type of sensor (for instance, ADS1232 from Texas Instruments for bridge-type resistive sensors and AD7745 from Analog Devices for single and differential capacitive sensors).
For some sensors, however, the block diagram in Fig. 2.1(a) can be simplified to that shown in Fig. 2.1(b) (Reverter and Pallàs-Areny, 2005), where the sensor is directly connected to the digital system without using either the signal conditioning circuit or the ADC; these circuits were initially proposed in application notes of μC manufacturers (Bierl, 1996; Cox, 1997; Richey, 1997). In such a circuit topology (a so-called “direct interface circuit”), the digital system appropriately excites the analog sensor to obtain a signal that can be directly measured in the digital domain, for instance, using an embedded digital timer. In comparison with the sensor electronic interface shown in Fig. 2.1(a), a direct interface circuit is simpler and needs fewer components; actually, it just needs a common low-cost general-purpose 8-bit μC working as a digital system. Therefore, a direct interface circuit has advantages in terms of cost, physical space, and power consumption, which is of major interest in autonomous sensors and in wireless sensor networks. Furthermore, the performance of such circuits is quite remarkable taking into account their simplicity, for instance, a nonlinearity error of 0.01% full-scale span (FSS) and a resolution of 13 bits when measuring resistive sensors in the kiloohm range, and 0.1% FSS and 9 bits when measuring capacitive sensors in the picofarad range. One of the main limitations of such circuits is that the measuring time depends on the value of the measurand and can be quite long (say, units or tens of millisecond).
This chapter deals with the direct interface circuit topology shown in Fig. 2.1(b) and is organized as follows. Section 2.2 provides an overview of the sensors that can be measured using such circuits. Section 2.3 describes the needs of the digital system (especially, a μC) to perform the tasks required in such circuits. After describing sensors and μCs, Section 2.4 explains how to join them to build a direct interface circuit. Section 2.5 shows some applications of these circuits. Section 2.6 describes likely future trends on this topic. Finally, Section 2.7 provides additional information about research groups working on these circuits.
2.2. Sensors
Sensors are the first block of the measurement chain (see Fig. 2.1) and are in charge of providing a signal in the electrical domain with information about the measurand. Sensors can be classified in different ways. Common classifications are in terms of the energy domain of the measurand (e.g., thermal sensors) or in terms of the electrical signal provided at the output (e.g., resistive sensors). However, Kirianaki et al. (2002) have proposed to classify them in terms of the domain of the electrical output signal. Accordingly, we have
- • Analog sensors, which provide an analog output signal whose amplitude is modulated by the measurand (see Fig. 2.2(a)). Such sensors have been, and still are, very common in industrial applications (e.g., the standardized Pt100 temperature sensor).
- • Quasidigital sensors, which provide an analog or digital output signal with a time-related parameter (such as period, frequency, duty cycle, or time interval) that is modulated by the measurand (see Fig. 2.2(b)). Although such time-related information is analogue, it can be directly measured by a digital system with a timer or a counter, hence the name “quasidigital.” Such output signals can be the result of the sensing principle (e.g., a resonant sensor) or obtained by embedding an analog sensor and some additional circuitry (e.g., an oscillator) into the same IC sensor (e.g., TMP04 from Analog Devices).
- • Digital sensors, which provide a digital output signal (see Fig. 2.2(c)) with a sequence of logic levels (i.e., 0s and 1s) modulated by the measurand. Such signals can also be the result of the sensing principle (e.g., an absolute position optical encoder) or obtained by means of an IC sensor that has some embedded electronics (e.g., DS18S20 from Maxim).

Analog sensors are usually measured by means of electronic interfaces similar to that shown in Fig. 2.1(a). However, as explained throughout this chapter, analog sensors can also be measured using the circuit topology proposed in Fig. 2.1(b) whenever the digital system excites them correctly. Actually, an appropriate excitation can convert analog sensors to quasidigital sensors because, as explained later in Section 2.4, the resulting output signal of the sensor is time-modulated. Both quasidigital and digital sensors can also be measured using the circuit topology shown in Fig. 2.1(b), but the excitation signal coming from the digital system is generally not required; for the measurement of quasidigital sensors, the digital system needs at least an embedded digital timer or counter.
The following subsections focus on two main types of analog sensor: resistive and capacitive sensors, which have been proposed to be measured using direct interface circuits. The topology, equivalent circuit model and applications of these sensors are discussed next. For more details about these sensors, please refer to Baxter (1997), Pallàs-Areny and Webster (2001), and Fraden (2004).
2.2.1. Resistive sensors
Resistive sensors transform signals from a given energy domain to the electrical domain by changing its electrical resistance, which can be modeled as
where ρ is the resistivity of the material, and l and A are the length and cross-section area of the conductor, respectively; note that any of the three parameters involved in Eq. (2.1) can be altered by the measurand. The following subsections classify resistive sensors in terms of the number of sensing elements that make up the sensor and how these are interconnected.
2.2.1.1. Single resistive sensor
As shown in Fig. 2.3(a), a single resistive sensor has one sensing element whose resistance (Rx) changes with the measurand. Such a resistance can be modeled as
where R0 is the nominal resistance at a reference value of the measurand, ΔR is the change of resistance due to (and, for some sensors, proportional to) the measurand, and xR is the relative change of resistance (i.e., xR = ΔR/R0) due to the measurand. These sensors are commonly used to measure temperature (e.g., platinum sensors and thermistors), light (e.g., light-dependent resistors), gas (e.g., tin dioxide gas sensors), and humidity. Among the previous examples, only platinum sensors show an Rx that changes linearly with temperature. The other sensors generally require linearization techniques in the analog and/or digital domain.

2.2.1.2. Differential resistive sensor
As shown in Fig. 2.3(b), a differential resistive sensor has two sensing elements (Rx1 and Rx2) that share a terminal and undergo opposite changes; that is, if Rx1 increases with the measurand, then Rx2 decreases and vice versa. Generally, xR is assumed to be equal in magnitude but opposite in direction for Rx1 and Rx2 and, hence, these can be modeled as
Because Rx1 and Rx2 can be also altered by undesired inputs such as temperature (thus causing multiplicative errors), the measurand information is not carried by Rx1 and Rx2 but by xR, which can be calculated by
Such sensors are frequently applied to measure, for example, linear or angular position/displacement, pressure (e.g., sensors based on Bourdon tubes), liquid level (e.g., float-based sensors), and magnetic field. The first three examples rely on a potentiometric differential sensor; for a linear potentiometric sensor, xR is proportional to the measurand.
2.2.1.3. Bridge-type resistive sensor
A Wheatstone bridge with one, two, or four sensing elements results in a quarter-bridge, half-bridge, or full-bridge sensor, respectively. For the full-bridge topology (see Fig. 2.3(c)), which is the most usual since it provides the highest sensitivity, the four sensing elements undergo that same xR but with opposite signs so that
These sensors are commonly used to measure weight (e.g., load cells based on metal strain gauges), pressure (e.g., sensors based on semiconductor strain gauges), and magnetic field (e.g., anisotropic magnetoresistive sensors and giant magnetoresistive sensors). For the previous examples, xR is usually considered to change linearly with the measurand, at least within a given measurement range.
2.2.2. Capacitive sensors
Capacitive sensors transform signals from a given energy domain to the electrical domain by changing its electrical capacitance, which, for a parallel-plate arrangement, can be modeled as
where ε is the electric permittivity of the dielectric between plates, S is the area of the plates, and d is the distance between plates; again, any of the three parameters involved in Eq. (2.6) can be altered by the measurand. The following subsections classify capacitive sensors according to the number of sensing elements and their interconnection.
2.2.2.1. Single capacitive sensor
As shown in Fig. 2.4(a), a single capacitive sensor has one sensing element whose capacitance (Cx) changes with the measurand. This capacitance can be modeled as
where C0 is the nominal capacitance at a reference value of the measurand, ΔC is the change of capacitance due to (and, for some sensors, proportional to) the measurand, and xC is the relative change of capacitance (i.e., xC = ΔC/C0) due to the measurand. Such sensors are frequently applied to measure, for example, liquid level, humidity, and gas.

2.2.2.2. Lossy capacitive sensor
Some capacitive sensors have a loss term that is usually modeled by a parasitic conductance Gx in parallel with Cx, as shown in Fig. 2.4(b). Regrettably, the value of Gx is usually not constant, but it changes with the measurand, depends on environmental factors (such as temperature, condensation, and pollution) and/or drifts with time. Capacitive sensors intended for the measurement of proximity, humidity, and two-component fluids concentration are common examples in which Gx can play an important role.
2.2.2.3. Differential capacitive sensor
As shown in Fig. 2.4(c), a differential capacitive sensor has two sensing elements (Cxl and Cx2) that share an electrode and undergo opposite changes; that is, if Cx1 increases with the measurand, then Cx2 decreases and vice versa. Usually, xC is considered equal but opposite for Cx1 and Cx2 and, hence, these can be modeled as
Note that Eq. (2.8) is also valid when d is the parameter altered by the measurand in Eq. (2.6) whenever the relative change of d is small. As in the resistive counterparts, xC carries the measurand information and can be calculated by
These sensors are commonly used to measure linear or angular position/displacement, acceleration, tilt, and pressure.
2.2.2.4. Bridge-type capacitive sensor
Sensing capacitive elements can also be interconnected in a bridge topology, as shown in Fig. 2.4(d). In such a case, the four sensing elements undergo the same xC but with opposite signs, so that
These sensors are frequently applied to measure, for instance, linear or angular position/displacement and pressure.
2.3. Microcontrollers
A microcontroller is a programmable processor-based digital IC widely used in control and measurement electronic systems. For the circuit shown in Fig. 2.1(b), the μC will be the digital system in charge of exciting and measuring the sensor without using either the signal conditioning circuit or the ADC. Other digital systems, such as field-programmable gate arrays (FPGAs), have also been proposed to carry out such functions (Ares et al., 2009; Vidal-Verdú et al., 2011), but a μC seems more advisable because of its lower cost (say, $1) and lower power consumption (say, about 1 mA in active mode and less than 1 μA in power-down mode) (Reverter, 2013; López-Lapeña et al., 2016).
2.3.1. General description
Microcontrollers basically have three main blocks embedded into the same IC (Ivanov, 2008):
- 1. Central processing unit (CPU): The CPU is the core of the μC in charge of executing instructions sequentially (with an instruction cycle of TS) to carry out a specific task. It incorporates an arithmetic logic unit that processes the data (of 8, 16, or 32 bits) involved in such a task. The higher the number of bits, the higher the computational power, but also the higher the cost and power consumption. For this reason, direct interface circuits are generally implemented using an 8-bit μC. Some CPUs have a power-down (or sleep) mode that suspends their activity and, hence, decreases the power consumption, which is of interest for direct interface circuits.
- 2. Memory: The embedded memory saves the instructions to be executed and data to be processed. Most of the current commercial μCs have a Harvard architecture with two separate memories: an instructions (or program) memory and a data memory. The former is usually one-time programmable or flash type, whereas the latter is random access memory.
- 3. Peripherals: Peripherals are embedded hardware resources that enable the μC to interact with the off-chip world. They are controlled by the CPU but they operate in parallel with the CPU. Common peripherals integrated in current commercial μCs are input/output ports, timers/counters, serial communication ports (e.g., UART, I2C, SPI), and ADC, among others. Input/output ports and timers are essential peripherals to carry out the measurement in direct interface circuits.
Nowadays, there are many commercial μCs from different manufacturers but with quite similar features. Some examples are the PIC16F family from Microchip Technology, the MSP430 family from Texas Instruments, the AVR family from Atmel, the HC08 family from Freescale, and the STM8 family from STMicroelectronics. As shown later in Section 2.5, direct interface circuits have been implemented using different commercial μCs, but the performance seems to be fairly independent of the μC used.
2.3.2. Time-interval measurement
An appropriate excitation signal in Fig. 2.1(b) can convert analog sensors (such as resistive or capacitive sensors) to quasidigital sensors providing a time-modulated signal. However, as explained later in Section 2.4, such a signal usually has a slow slew rate (SR); that is, the transition from “1” to “0” or vice versa is slow. For this reason, we next explain the operating principle of μCs when measuring such signals, the uncertainty sources and some design solutions to improve the measurement.
Let us suppose that the μC has to measure the time interval T0 of the input signal shown in Fig. 2.5(a), which has a slow SR; T0 is actually the time interval required to go from V1 (which is a high voltage identified as a digital “1”) to VT (which is an internal threshold voltage of an input port pin of the μC that determines the transition from “1” to “0”). In such a case, moreover, the start of the measurement is synchronized with the embedded timer, which is what really happens in the direct interface circuits described in Section 2.4. Once the measurement starts, the timer increases by 1 at every rising (or falling) edge of its reference oscillator whose period equals TS; it is assumed that such a period equals the instruction cycle of the CPU, but they could be different using a prescaler. Then, when the input signal crosses VT, the CPU issues a command to stop the time-interval measurement and to read the timer. In Fig. 2.5(a), the measurement result is the digital number 8.
The time-to-digital conversion explained previously has three main uncertainty sources (Bouwens, 1984):
- 1. Instability of the reference oscillator: Because the measurement method uses an oscillator as a reference, an unstable oscillator brings about an uncertain measurement result. For example, as shown in Fig. 2.5(b), T0 is converted to the digital number 6 instead of 8 when using an unstable reference oscillator. The main instability factors are time drift, temperature dependence, and sensitivity to supply voltage variations.
- 2. Quantization: The time-to-digital conversion suffers from quantization effects similar to those obtained in ADCs. For instance, if the time interval to be measured increases from T0 to
 , as shown in Fig. 2.5(c), the resulting digital number is the same as before (i.e., 8) because the increase of the time interval is lower than TS.
, as shown in Fig. 2.5(c), the resulting digital number is the same as before (i.e., 8) because the increase of the time interval is lower than TS. - 3. Trigger noise: The voltage comparison between the input signal and VT is a noise-sensitive process that can be erroneously triggered. For example, in Fig. 2.5(d), the voltage comparison is triggered in advance due to noise and the result is the digital number 7 instead of 8. Trigger noise has two components: external trigger noise (i.e., noise superimposed on the input signal to be measured) and internal trigger noise (i.e., noise superimposed on VT). The latter arises from at least three different sources (Reverter and Pallàs-Areny, 2006): inherent (thermal) noise, power supply noise, and CPU-activity noise.
Several design guidelines can be applied to reduce the effects of the previous uncertainty sources and, hence, to improve the time-interval measurement (Reverter and Pallàs-Areny, 2006). The main design rules for each uncertainty source are the following:
- 1. Microcontrollers can use three types of reference oscillator: an RC oscillator, ceramic resonator, or crystal oscillator, whose common specifications are summarized in Table 2.1. According to this table, accurate and stable time-interval measurements should be performed using a crystal oscillator as a reference, although it is the most expensive option. When using a crystal oscillator, the effects of its instability are generally much lower than those due to quantization and trigger noise.
- 2. Quantization error can be decreased by increasing the frequency of the reference oscillator of the timer, which nowadays can be up to tens of MHz. However, increasing such a frequency generally results in a higher power consumption. Quantization error also depends on the technique and resources used by the CPU for detecting the threshold voltage crossing at the end of the measurement. Three alternatives can be distinguished:

Figure 2.5 (a) Time-interval measurement carried out by a μC, (b) effects of an unstable reference oscillator, (c) effects of quantization, (d) effects of trigger noise.
Table 2.1

- a. Polling: The input signal to be measured is connected to a common input port pin whose state is periodically (every P instruction cycles) polled by the CPU. When the CPU detects a change (i.e., transition from “1” to “0” in Fig. 2.5(a)), it issues a command to read the timer. Accordingly, the effective quantization error ranges from 0 to P·TS and, hence, it depends on the length of the polling loop.
- b. General-purpose interrupt: The input signal is connected to a general-purpose external interrupt pin. When the threshold voltage is crossed, the CPU completes the execution of the current instruction and then executes the interrupt service routine (ISR) that reads the timer. However, because not all the instructions have the same execution time, the interrupt response time depends on the instruction being executed when the interrupt request arrives. Consequently, the effective quantization error ranges from 0 to M·TS, where M is the number of instruction cycles needed to execute the longest instruction.
- c. Capture module: The input signal is connected to an input port pin associated to a capture module. This pin works as an external interrupt pin, but the current value of the timer is automatically captured by a special register when the threshold voltage is crossed. Then, once the current instruction has been executed, the CPU jumps to the ISR and reads the special register, not the timer. Therefore, the quantization error is independent of the instruction being executed and ranges from −TS to 0, which is the lowest one. Accordingly, a capture module should be used for a high-resolution, accurate time-interval measurement. Smart capture modules embedded into FPGAs have also been proposed for direct sensor-to-FPGA interfaces (Oballe-Peinado et al., 2015).
- 3. Because noise superimposed on the supply voltage of the μC couples to VT, the supply voltage should be as clean as possible. For this reason, it is highly recommended to have an appropriate decoupling capacitor between the power supply pins and to make a suitable layout of the ground and supply tracks. For input port pins with a Schmitt trigger (ST) buffer, noise coupling to the lower threshold voltage VTL (which detects transitions from “1” to “0”) is less than that coupling to the higher threshold voltage VTH (which detects transitions from ‘0” to “1”) and, hence, it is preferable to use VTL for the voltage comparison (Reverter et al., 2003). Furthermore, because the execution of instructions (especially those that require power, such as jump and call instructions) also brings about noise that couples to VT, the activity of the CPU should be as low as possible while it waits for the threshold voltage to be crossed. Accordingly, it is suggested to place the CPU into sleep mode (whenever the timer and the interrupt system keep working) to decrease the internal trigger noise. Note that if the CPU is placed into sleep mode and a general-purpose interrupt is used, then M = 1 and the resulting quantization error is equal (in absolute value) to that obtained using the capture module.
The previous guidelines for avoiding/reducing such uncertainty sources in time-interval measurements will be applied in the direct interface circuits proposed in the following sections.
2.4. Interface circuits
After describing sensors and μCs, this section explains how to join them to build a direct interface circuit. The operating principle of such circuits is described and then applied to measure each of the sensor topologies indicated in Sections 2.2.1 and 2.2.2.
2.4.1. Operating principle
Two measurement methods have been proposed for building the direct interface circuit topology shown in Fig. 2.1(b):
- 1. Direct interfaces based on an RC circuit where the μC measures the time interval needed to charge (or discharge) a capacitance C to a given threshold voltage through a resistance R. This method has been applied to measure resistive and capacitive sensors (Reverter and Pallàs-Areny, 2005a; Reverter, 2012).
- 2. Direct interfaces based on charge transfer, where the μC counts the number of charge-transfer cycles needed to charge a reference capacitor to a given threshold voltage via a capacitive sensor. This method has been mostly applied to measure capacitive sensors (Dietz et al., 2002; Gaitán-Pitre et al., 2009), although a proposal for resistive sensors has also been suggested (Gaitán-Pitre and Pallàs-Areny, 2015).
This chapter focuses on direct interfaces based on an RC circuit (see Fig. 2.6(a)) operating as follows. If C is initially discharged and a step of amplitude V1 is applied at the input, the output voltage is (see Fig. 2.6(b))

Figure 2.6 (a) RC circuit, (b) charge process of an RC circuit, (c) discharge process of an RC circuit.
which is proportional to R and C. On the other hand, if C is already charged to V1 and a step toward ground is applied at the input, the output voltage is (see Fig. 2.6(c))
and the time needed to discharge C from V1 to VT is
which, again, is proportional to R and C.
The RC circuit in Fig. 2.6(a) can be directly connected to a μC using the circuit topologies shown in Figs. 2.7(a) and 2.8(a), where Pins 1 and P are two input/output digital port pins. Pin 1, which is in charge of monitoring the exponential charging or discharging voltage, usually includes an ST buffer (with two threshold voltages, VTL and VTH) and should be linked to a capture module (see Section 2.3.2). The circuits in Figs. 2.7(a) and 2.8(a) can measure either the charge time or the discharge time of the RC circuit, but it is expected that there will be less variability in the discharge-time measurement. This is because the discharge-time measurement uses VTL as a threshold voltage, which is less noisy (see Section 2.3.2) than VTH used for the charge-time measurement. In both circuits (Figs. 2.7(a) and 2.8(a)), the measurement of the discharge time involves two operational steps: (1) charge and (2) discharge and measurement.
The circuit in Fig. 2.7(a), which is intended for the measurement of a resistive sensor (Rx), operates as follows. During the charge stage (see Fig. 2.7(c)), Pin 1 is set as an output providing a digital “1,” whereas Pin P is set as an input offering high impedance (HZ). Therefore, the capacitor Cd is rapidly charged to the analog output voltage (V1) corresponding to a digital “1,” which is generally equal to the supply voltage (VDD). During the discharge and measurement stage (see Fig. 2.7(d)), Pin 1 is set as an HZ input and Pin P is set as an output providing a digital “0”. Consequently, Cd is discharged toward ground through Rx while the embedded timer measures the time interval required to do so. When the exponential discharging voltage crosses VTL, the timer is read and a digital number proportional to Rx (see Eq. 2.14) is achieved. The resulting waveform of the voltage across Cd during the charge–discharge process is shown in Fig. 2.7(b).
For the measurement of a capacitive sensor (Cx), it is recommended that the position of the resistance and the capacitance are exchanged, as shown in Fig. 2.8(a). During the charge stage (see Fig. 2.8(c)), both pins are set as an output: Pin 1 provides a digital “1,” whereas Pin P provides a digital “0.” Therefore, Cx is rapidly charged to V1. During the discharge and measurement stage (see Fig. 2.8(d)), Pin 1 is set as an HZ input and Pin P continues to provide a digital “0”. Consequently, Cx is discharged toward ground through the resistor Rd while the timer is running. When the CPU detects that the threshold voltage has been crossed (see Fig. 2.8(b)), the timer is read and a digital number proportional to Cx (see Eq. 2.14) is achieved.

2.4.2. Circuits for resistive sensors
The operating principle explained in Fig. 2.7 can be applied to measure the three topologies of resistive sensor described in Section 2.2.1. Before discussing the proposed circuit for each sensor topology, a few general remarks are given on the components required:
- • The capacitor Cd is determined by a speed-resolution trade-off (Reverter and Pallàs-Areny, 2004), but for TS ≈ 250 ns it is advisable to operate with a time constant (R·C) of about a few units of millisecond. For instance, the measurement of a resistive sensor of about 1000 Ω should use a Cd of a few units of microfarad (e.g., 2.2 μF).
- • It is recommended that an additional resistor Ri is used between Pin 1 and Node 1, which improves the rejection of power supply noise/interference (Reverter et al., 2007) but at the expense of a longer charge stage. The cut-off frequency of the low-pass filter determined by Ri and Cd (during the charge stage) should be as low as possible but with a reasonable length of charging process (say, less than 1 ms). For example, if Cd = 2.2 μF then Ri < 100 Ω.
- • It is also advisable to use an additional resistor Rs between Node 1 and Rx, which ensures that the discharging current is less than the maximum output current (Imax) sunk by a port pin even when Rx is very low. Assuming VDD = 5V and Imax = 25 mA, then Rs > 200 Ω.

2.4.2.1. Single resistive sensor
The single resistive sensor shown in Fig. 2.3(a) can be directly connected to a μC using the circuit shown in Fig. 2.9 (Reverter et al., 2005). This circuit applies the three-signal auto-calibration technique (Meijer, 2008) so as to have a measurement result insensitive to both multiplicative and additive parameters of the circuit. Accordingly, the interface circuit performs three discharge-time measurements:

- 1. Sensor measurement, which is intended to measure Rx.
- 2. Reference measurement, which is intended to measure a reference resistor (Rref).
- 3. Offset measurement, which is intended to measure the offset brought about by the internal resistance (Rpin) of the port pins of the μC. Such resistance is assumed here to be the same for all the port pins, but actually there is a mismatch of a few tenths of ohm that generates offset and gain errors (Reverter et al., 2005).
Table 2.2 summarizes the state of Pins 2, 3, and 4 during the discharge stage and the resulting discharge time for each of the three measurements, where kR = Cd ln (V1/VTL). Once we have the three discharge times (Tx, Tref, and Toff), the sensor resistance can be estimated by
which is insensitive to the tolerance and low-frequency variability of Cd, V1, and VTL. Circuits similar to that shown in Fig. 2.9 but applying other calibration techniques (Kokolanski et al., 2014) or including diodes and switches so as to measure a remote single resistive sensor (Nagarajan et al., 2017) have also been proposed. In addition, Sifuentes et al. (2017) evaluated the performance of the circuit in Fig. 2.9 when a resistive sensor subjected to dynamic changes is measured.
Table 2.2
| Measurement | Pin 2 | Pin 3 | Pin 4 | Discharge time |
|---|---|---|---|---|
| Sensor | “0” | HZ | HZ | Tx = kR(RS + Rx + Rpin) |
| Reference | HZ | HZ | “0” | Tref = kR(RS + Rref + Rpin) |
| Offset | HZ | “0” | HZ | Toff = kR(RS + Rpin) |

2.4.2.2. Differential resistive sensor
The direct interface circuit proposed for the measurement of differential resistive sensors (see Fig. 2.3(b)) is shown in Fig. 2.10 (Reverter and Casas, 2009), which also performs three discharge-time measurements:
The state of Pins 2, 3, and 4 during the discharge stage and the discharge time for each of the three measurements is summarized in Table 2.3. By means of these three discharge times (T1, T2, and Toff), the parameter xR of the differential sensor can be estimated by
which is similar to Eq. (2.4) but, instead of resistances, it uses discharge times. Unlike the measurement of single resistive sensors, xR can be estimated here without using any reference resistor.

Table 2.3
| Measurement | Pin 2 | Pin 3 | Pin 4 | Discharge time |
|---|---|---|---|---|
| Sensor #1 | HZ | “0” | HZ | T1 = kR(RS + Rx1 + Rpin) |
| Sensor #2 | HZ | HZ | “0” | T2 = kR(RS + Rx2 + Rpin) |
| Offset | “0” | HZ | HZ | Toff = kR(RS + Rpin) |

2.4.2.3. Bridge-type resistive sensor
Resistive sensors in a bridge topology (see Fig. 2.3(c)) can be directly connected to a μC using the interface circuit shown in Fig. 2.11 (Sifuentes et al., 2008). This circuit measures four discharge times (T1, T2, T3, and Toff) by applying the configuration of pins indicated in Table 2.4. Accordingly, for a full-bridge topology, the parameter xR of the sensor can be estimated by
For other bridge topologies, xR can be estimated using other time-based equations (Sifuentes et al., 2008). Furthermore, for sensors whose output is temperature-dependent (e.g., piezoresistive pressure sensors), the result obtained from Eq. (2.17) can be easily corrected by estimating the temperature by means of the sensor itself (Reverter et al., 2009).

Table 2.4
| Measurement | Pin 2 | Pin 3 | Pin 4 | Pin 5 | Discharge time |
|---|---|---|---|---|---|
| Sensor #1 | HZ | “0” | HZ | HZ | T1 = kR[RS + (Rx4∥(Rx1 + Rx2 + Rx3)) + Rpin] |
| Sensor #2 | HZ | HZ | “0” | HZ | T2 = kR[RS + ((Rx3 + Rx4)∥(Rx1 + Rx2)) + Rpin] |
| Sensor #3 | HZ | HZ | HZ | “0” | T3 = kR[RS + (Rx2∥(Rx1 + Rx3 + Rx4)) + Rpin] |
| Offset | “0” | HZ | HZ | HZ | Toff = kR(RS + Rpin) |

2.4.3. Circuits for capacitive sensors
The four topologies of capacitive sensor described in Section 2.2.2 can be directly measured by a μC using the operating principle explained in Fig. 2.8. Again, before discussing the proposed circuits, a few general remarks are given on the components required:
- • The resistor Rd is determined by a speed-resolution trade-off (Reverter and Pallàs-Areny, 2004). However, unlike Section 2.4.2, here it is advisable to operate with a shorter time constant (say, a few hundreds of microsecond). Otherwise, the required Rd is too high and then Node 1 (see Fig. 2.8(a)) becomes a high-impedance point too susceptible to interference. Moreover, the effects of Gx (see Fig. 2.4(b)) would be more significant if a high-value Rd is employed. For instance, the measurement of a capacitive sensor of 150 pF should use an Rd of about a few units of megaohm (e.g., 1 MΩ).
- • It is also recommended that an additional resistor (Ri) be used between Pin 1 and Node 1 to improve the rejection of power supply noise/interference (Reverter et al., 2007). The cut-off frequency of the low-pass filter determined by Ri and Cx (during the charge stage) should be as low as possible but, at the same time, Ri must be considerably less than Rd to ensure an appropriate charge of Cx. For example, if Rd = 1 MΩ then Ri < 1 kΩ.
2.4.3.1. Single capacitive sensor
The single capacitive sensor shown in Fig. 2.4(a) can be directly connected to a μC using the circuit shown in Fig. 2.12 (Reverter and Casas, 2008a). As in its resistive counterpart, the circuit applies the three-signal auto-calibration technique (Meijer, 2008) and, for this reason, it carries out three discharge-time measurements:
- 1. Sensor measurement, which is intended to measure Cx.
- 2. Reference measurement, which is intended to measure a reference capacitor (Cref).
- 3. Offset measurement, which is intended to measure the offset due to the parasitic capacitance (Cs) between Node 1 and ground. The parasitic capacitances of the port pins set as an HZ input are assumed negligible throughout Section 2.4.3, but their effects are carefully analyzed in Reverter and Casas (2010a).

Table 2.5
| Measurement | Pin 2 | Pin 3 | Discharge time |
|---|---|---|---|
| Sensor | “0” | HZ | Tx = kC(Cx + CS) |
| Reference | HZ | “0” | Tref = kC(Cref + CS) |
| Offset | HZ | HZ | Toff = kCCS |

Table 2.5 summarizes the state of Pins 2 and 3 during the charge–discharge process and the discharge time for each of the three measurements, where kC = Rd ln(V1/VTL). Once the three discharge times (Tx, Tref, and Toff) are measured, the sensor capacitance can be estimated by
which, again, is insensitive to the tolerance and low-frequency variability of Rd, V1, and VTL.
2.4.3.2. Lossy capacitive sensor
If the circuit in Fig. 2.12 uses an extra port pin (Pin 0, in Fig. 2.13) and performs an additional discharge-time measurement Tad (see Table 2.6, where k = ln(V1/VTL)), the capacitance and parasitic conductance of a lossy capacitive sensor (see Fig. 2.4(b)) can be estimated by (Reverter and Casas, 2010b):

Table 2.6
| Measurement | Pin 0 | Pin 2 | Pin 3 | Discharge time |
|---|---|---|---|---|
| Sensor | “0” | “0” | HZ | Tx = k(Rd∥Gx−1) (Cx + CS) |
| Reference | “0” | HZ | “0” | Tref = kRd(Cref + CS) |
| Offset | “0” | HZ | HZ | Toff = kRdCS |
| Additional | HZ | “0” | HZ | Tad = kGx−1(Cx + CS) |

Note that if there is a very low value of Gx, then Tad is much longer than the other discharge times and, hence, Eq. (2.19) can be simplified to Eq. (2.18).
2.4.3.3. Differential capacitive sensor
The direct interface circuit proposed to measure differential capacitive sensors (see Fig. 2.4(c)) is shown in Fig. 2.14 (Reverter and Casas, 2010a) and performs the three discharge-time measurements indicated in Table 2.7. By means of these three discharge times (T1, T2, and T3), xC can be estimated by
The parameter xC can also be estimated by performing an offset measurement and applying a time-based equation similar to Eq. (2.16) (Reverter and Casas, 2008b), but the result becomes more sensitive to the parasitic capacitances of the port pins set as an HZ input. On the other hand, as in its resistive counterpart, the proposed circuit does not require any reference capacitor.

Table 2.7
| Measurement | Pin 2 | Pin 3 | Discharge time |
|---|---|---|---|
| Sensor #1 | “0” | HZ | T1 = kC(Cx1 + CS) |
| Sensor #2 | HZ | “0” | T2 = kC(Cx2 + CS) |
| Sensor #3 | “0” | “0” | T3 = kC(Cx1 + Cx2 + CS) |

2.4.3.4. Bridge-type capacitive sensor
Capacitive sensors in a bridge topology (see Fig. 2.4(d)) can also be directly connected to a μC using the interface circuit shown in Fig. 2.15. This circuit measures four discharge times (T1, T2, T3, and Toff) by applying the configuration of pins indicated in Table 2.8. For a full-bridge topology, xC can be estimated by

Table 2.8
| Measurement | Pin 2 | Pin 3 | Pin 4 | Discharge time |
|---|---|---|---|---|
| Sensor #1 | “0” | “0” | HZ | T1 = kC[(Cx1 ⊕ Cx2) + Cx4 + CS] |
| Sensor #2 | “0” | HZ | “0” | T2 = kC[Cx2 + Cx4 + CS] |
| Sensor #3 | HZ | “0” | “0” | T3 = kC[Cx2 + (Cx3 ⊕ Cx4) + CS] |
| Offset | HZ | HZ | HZ | Toff = kCCS |

2.5. Applications
This section describes how the direct interface circuits explained in Section 2.4 have been implemented using commercial low-cost μCs (see Table 2.9) and then applied to measure commercial sensors (see Table 2.10).
2.5.1. Temperature measurement
The direct interface circuit shown in Fig. 2.9 using μC #1 (see Table 2.9) was applied to measure resistors that emulated the Pt1000 temperature sensor indicated in Table 2.10 (Reverter et al., 2005); the other components of the circuit were Rref = 1470 Ω, Rs = 330 Ω, and Cd = 2.2 μF. Fig. 2.16 shows the resistance estimated by Eq. (2.15) for temperatures between −45 and +120°C, which were emulated by resistors. According to the straight line fitted to the experimental data by means of the least-squares method, the maximum nonlinearity error was 0.01% FSS. On the other hand, the effective resolution was almost 13 bits (which corresponds to 0.1 Ω and, hence, to 0.025°C) for a measuring time of about 50 ms required to average ten measurements. From the author's point of view, such values of linearity and resolution are quite remarkable, taking into account the simplicity of the proposed interface circuit.
2.5.2. Position measurement
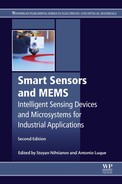
A 1-kΩ linear potentiometer emulating a potentiometric position sensor was measured by the direct interface circuit in Fig. 2.10 using μC #2 (see Table 2.9) (Reverter and Casas, 2009); the other components of the circuit were Rs = 470 Ω, Ri = 100 Ω, and Cd = 470 nF. Fig. 2.17 shows the value of xR estimated by Eq. (2.16) for different positions of the wiper of the potentiometer. According to the fitted straight line, the maximum nonlinearity error was 0.01% FSS, which was mainly due to quantization effects in the discharge-time measurement. On the other hand, the effective resolution was almost 13 bits (which corresponds to changes of xR equal to 0.025%) for a measuring time of about 100 ms required to average one hundred measurements. The performance in terms of linearity and resolution was quite similar to that obtained in Section 2.5.1.
2.5.3. Magnetic field measurement
The direct interface circuit shown in Fig. 2.11 using μC #3 (see Table 2.9) was applied to measure the magnetic sensor indicated in Table 2.10 (Sifuentes et al., 2008); the other components of the circuit were Ri = 120 Ω and Cd = 2.2 μF. Fig. 2.18 shows the value of xR estimated by Eq. (2.17) for magnetic fields between 75 and 600 μT generated by a current-controlled solenoid; in fact, the sensor could operate between −600 and +600 μT, but it was tested in a lower range because of limitations of the measurement setup. The estimated xR was always positive and very small (lower than 0.6%), but it agrees with the typical sensitivity of the sensor (see Table 2.10). According to the fitted straight line, the maximum nonlinearity error was 1.8% FSS, but this was mainly due to the nonlinearity of the sensor (see Table 2.10); actually, when the circuit measured a bridge circuit emulated by resistors instead of the sensor, the maximum nonlinearity error was about 0.1% FSS. Therefore, the sensor—not the interface circuit, in spite of its simplicity—limited the accuracy of the measurement, as is to be expected from a well-designed interface circuit. On the other hand, assuming the overall measurement range, the effective resolution was about 7 bits (which corresponds to 10 μT) for a measuring time of about 50 ms required to average ten measurements. Note that for the same resolution in ohms (i.e., 0.1 Ω), the resolution in bits here is smaller than that in Section 2.5.1 because the overall change of resistance is smaller (i.e., ±6 Ω according to Table 2.10).
Table 2.9
| μC #1 | μC #2 | μC #3 | |
|---|---|---|---|
| Manufacturer | Microchip | Atmel | Texas Instruments |
| Model | PIC16F873 | AVR ATtiny2313 | MSP430F123 |
| Supply voltage (VDD) | 5.0 V | 5.0 V | 3.0 V |
| Threshold voltage (VTL) | 1.4 V | 2.2 V | 1.1 V |
| Reference oscillator | Crystal—20 MHz | Crystal—20 MHz | Crystal—4 MHz |
| Embedded timer | 16-bit Timer1 | 16-bit Timer1 | 16-bit Timer_A3 |
| Time base of timer (TS) | 200 ns | 50 ns | 250 ns |
| Crossing detection | External interrupt | Capture module | External interrupt |
| Sleep mode | Noa | Yes | Yes |

Table 2.10
| Temperature sensor | Magnetic sensor | Humidity sensor | Accelerometer | |
|---|---|---|---|---|
| Manufacturer | – | Honeywell | Humirel | VTI Technologies |
| Model | Pt1000 | HMC1052 | HS1101 | SCG10Z-G001CC |
| Type | Resistive | Resistive (AMR) | Capacitive | Capacitive |
| Topology | Single | Full bridge | Single | Differential |
| Typical R0 or C0 | 1000 Ω at 0°C | 1000 Ω at 0 μT | 180 pF at 55%RH | 1.5 pF at rest |
| Typical sensitivity | +3.81 Ω/°C | ±1 Ω/100 μT | +0.34 pF/%RH | ±0.105 pF/g |
| Nonlinearity | – | <1.8% FSSa | <2% FSSa | – |
| Tested range | [−45, 120]°C | [75, 600] μT | [10, 90]%RH | [−1, +1] g |


Figure 2.16 Experimental results of the circuit in Fig. 2.9 when measuring a temperature sensor.

Figure 2.17 Experimental results of the circuit in Fig. 2.10 when measuring a potentiometric sensor.

Figure 2.18 Experimental results of the circuit in Fig. 2.11 when measuring a magnetic sensor.
2.5.4. Relative humidity measurement
The humidity sensor shown in Table 2.10 was measured by the direct interface circuit in Fig. 2.12 using μC #2 (see Table 2.9) (Reverter and Casas, 2008a); the other components of the circuit were Cref = 177 pF, Rd = 1 MΩ, and Ri = 1 kΩ. Fig. 2.19 shows the capacitance estimated by Eq. (2.18) for different values of relative humidity (RH) obtained by means of saturated salt solutions. The capacitance was between 171 and 194 pF for an RH range between 10% and 90%. The maximum nonlinearity error was 2.0% FSS, but this was mainly due to the nonlinearity of the sensor (see Table 2.10); in fact, when the circuit measured capacitors instead of the capacitive sensor, the maximum nonlinearity error was 0.1% FSS. Therefore, as in Section 2.5.3, the sensor (and not the interface circuit) limited the accuracy of the measurement. The effective resolution was 9 bits (which corresponds to 50 fF and, hence, to 0.2% RH) for a measuring time of about 50 ms required to average one hundred measurements.
2.5.5. Tilt measurement
The direct interface circuit in Fig. 2.14 using μC #2 (see Table 2.9) was applied to measure the accelerometer shown in Table 2.10 (Reverter and Casas, 2010a); the other components of the circuit were Rd = 20 MΩ and Ri = 10 kΩ. Fig. 2.20 shows the value of xC estimated by Eq. (2.21) for accelerations between −1 and +1 g, which correspond to inclinations between −90 degrees and +90 degrees. The estimated xC was between −7% and +7%, which agrees with the typical sensitivity of the sensor (see Table 2.10). The maximum nonlinearity error was 1.1% FSS, which was basically due to quantization effects in the discharge-time measurement. The effective resolution was 7 bits (which corresponds to 15 mg) for a measuring time of about 50 ms required to average ten measurements. In comparison with Section 2.5.4, the performance of the circuit in Fig. 2.14 was not so good, but this is because it had to measure a very low-value capacitive sensor with a very low sensitivity (see Table 2.10).

Figure 2.19 Experimental results of the circuit in Fig. 2.12 when measuring a humidity sensor.

Figure 2.20 Experimental results of the circuit in Fig. 2.14 when measuring an accelerometer.
2.5.6. Other applications
Direct interface circuits have also been applied to measure other physical and chemical quantities, for example, atmospheric pressure (Jordana and Pallàs-Areny, 2006), tactile pressure (Vidal-Verdú et al., 2011), gas (Courbat et al., 2012; Dutta et al., 2016), light (Sifuentes, 2009), liquid level (Chetpattananondh et al., 2014), and respiratory rate (Sifuentes et al., 2016).
2.6. Future trends
The field of direct interface circuits is still under research, and many interesting ideas could be developed in the near future. From the author's point of view, future work on direct interface circuits could be focused on
- • Applications: Many measurement systems based on resistive and capacitive sensors, but especially those intended for low-cost low-power applications, could benefit from the advantages of direct interface circuits. In fact, recently, such circuits have been proposed to measure low-power magnetic sensors for vehicle detection (Sifuentes et al., 2011), low-cost environmental sensors made by inkjet printing of silver on paper (Courbat et al., 2011), low-power gas sensors (Courbat et al., 2012), and low-cost low-power RH sensors to be integrated into radio-frequency identification labels (Pelegrí-Sebastiá et al., 2012).
- • Improving the current operating principle and/or developing novel operating principles: The performance of direct interfaces based on an RC circuit could be improved by incorporating new ideas and/or techniques; for instance, the so-called vernier technique (Sifuentes et al., 2009). Such techniques could either improve the resolution or reduce the cost, measuring time, and power consumption while preserving the same resolution. On the other hand, other operating principles, such as the charge-transfer technique indicated in Section 2.4.1, are also under research. These are expected to improve the circuit performance especially when measuring low-value capacitive sensors.
- • Measuring other sensors: Most of the research work done so far on direct interface circuits has been focused on measuring resistive and capacitive sensors, but the direct measurement of other analog sensors is also of interest. The design and analysis of direct interface circuits, for instance, for inductive sensors (Kokolanski et al., 2015; Ramadoss and George, 2015), voltage-output sensors (Bengtsson, 2012; Dutta et al., 2016; Reverter and Gasulla, 2017), current-output sensors (Stojanovic and Karadaglic, 2007), array sensors (Oballe-Peinado et al., 2016), and impedance sensors (Czaja, 2012) using common or novel operating principles is an interesting topic of research.
- • Using novel peripherals embedded into μCs: This field of technology is developing at a rapid rate. It almost seems that, with every passing day, commercial μCs are designed with more embedded resources and peripherals. Some of them—for example, analog comparators or configurable logic cells—could be of interest to improve the circuit performance and/or to develop novel operating principles. The power-down modes included in novel commercial μCs could also be of help to decrease the power consumption of such circuits even further.
- • Designing an ASIC or ASSP: The design of an application-specific integrated circuit (ASIC) or an application-specific standard processor (ASSP) could also be of interest to have a digital system optimized in terms of power and embedded resources. Actually, a commercial ASSP known as USTI (which means universal sensors and transducers interface) has been recently designed. This chip is able to measure resistive sensors (Yurish, 2009a, 2011) and capacitive sensors (Yurish, 2009b) using the operating principle explained in Section 2.4.
Sources of further information and advice
Researchers worldwide are involved in the field of direct interface circuits. Some of these researchers, their affiliation, and a brief description of their work are indicated below.
- • Courbat, J. and Briand, D. (Ecole Polytechnique Fédérale de Lausanne, Lausanne, Switzerland), who use direct interface circuits to measure low-cost low-power sensors.
- • Czaja, Z. (Gdansk University of Technology, Gdansk, Poland), who proposes direct interface circuits for impedance sensors.
- • Gaitán-Pitre, J.E. and Pallàs-Areny, R. (Universitat Politècnica de Catalunya, Castelldefels, Spain), who undertake research on direct interface circuits based on the charge-transfer technique.
- • George, B. (Indian Institute of Technology Madras, Chennai, India), who proposes direct interface circuits for different types of analog sensors.
- • Kokolanski, Z. (University Ss. Cyril and Methodius, Skopje, Macedonia), who designs and analyses direct interface circuits for inductive sensors.
- • Pelegrí-Sebastiá, J. (Universidad Politécnica de Valencia, Gandia, Spain), who uses direct interface circuits to measure low-cost, low-power sensors.
- • Sifuentes, E. and González-Landaeta, R. (Universidad Autónoma de Ciudad Juárez, Ciudad Juárez, Mexico), who undertake research on direct interface circuits for vehicle detection and for the measurement of biomedical signals.
- • Vidal-Verdú, F. (University of Malaga, Malaga, Spain), who uses FPGAs to build direct interface circuits for tactile sensors.
- • Yurish, S. (Technology Assistance BCN2010, Barcelona, Spain), who designs ASSPs based on the operating principle explained throughout this chapter.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.