
State-Feedback Nonlinear H∞
In this chapter, we discuss the nonlinear H∞
The problem of robust control in the presence of modelling errors and/or parameter variations is also discussed. Sufficient conditions for the solvability of this problem are given, and a class of controllers is presented.
5.1 State-Feedback H∞
The set-up for this configuration is shown in Figure 5.1, where the plant is represented by an affine causal state-space system defined on a smooth n-dimensional manifold χ ⊆ ℜn in local coordinates x = (x1,…, xn):
Σa:{˙x=f(x)+g1(x)w+g2(x)u; x(t0)=x0y =xz=h1(x)+k12(x)u |
(5.1) |
where x ∈ X
Again Figure 5.1 also shows that for this configuration, the states of the plant are accessible and can be directly measured for the purpose of feedback control. We begin with the definition of smooth-stabilizability and also recall the definition of ℒ2
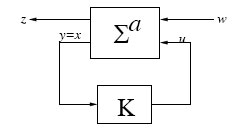
FIGURE 5.1
Feedback Configuration for State-Feedback Nonlinear H∞
Definition 5.1.1 (Smooth-stabilizability). The nonlinear system Σa (or simply [f, g2]) is locally smoothly-stabilizable if there exists a C0-function F : U
Definition 5.1.2 The nonlinear system Σa is said to have locally ℒ2
∫Tt0‖z(t)‖2dt≤ γ2∫Tt0‖w(t)‖2dt+β(x0), ∀T>t0,
for some bounded C0 function β : U → ℜ such that β(0) = 0. The system has ℒ2
Since we are interested in designing smooth feedback laws for the system to make it asymptotically or internally stable, the requirement of smooth-stabilizability for the system will obviously be necessary for the solvability of the problem before anything else. The suboptimal state-feedback nonlinear H∞
Definition 5.1.3 (State-Feedback Nonlinear H∞
(5.2) |
for some smooth function α depending on x and possibly t only, such that the closed-loop system:
∑aclp:{˙x=f(x)+g1(x)w+g2(x)α(x,t); x(t0)=x0z=h1(x)+k12(x)α(x,t) |
(5.3) |
has, for all initial conditions x(t0) ∈ N, locally ℒ2
Internal stability of the system in the above definition means that all internal signals in the system, or trajectories, are bounded, which is also equivalent to local asymptotic-stability of the closed-loop system with w = 0 in this case.
Remark 5.1.1 The optimal problem in the above definition is to find the minimum γ⋆
One way to measure the ℒ2
‖Σa‖H∞=supw∈W‖zss‖T‖w‖T
where
‖w‖T=1T(∫t0+Tt0‖w(s)‖2ds)12, ‖zss‖T=1T(∫t0+Tt0‖w(s)‖2ds)12.
Returning now to the SFBNLHICP, to derive sufficient conditions for the solvability of this problem, we apply the theory of differential games developed in Chapter 2. It is fairly clear that the problem of choosing a control function u⋆
minu∈U maxw∈W J(u,w)=12∫Tt0[‖z(t)‖2−γ2‖w(t)‖2]dt, |
(5.4) |
subject to the dynamical equations (5.1) over a finite time-horizon T > t0.
At this point, we separate the problem into two subproblems; namely, (i) achieving local disturbance-attenuation and (ii) achieving local asymptotic-stability. To solve the first problem, we allow w to vary over all possible disturbances including the worst-case disturbance, and search for a feedback control function u:X×ℜ→U
Proposition 5.1.1 Suppose for γ = γ⋆
Proof:
J(u⋆,w⋆)≤0⇒‖z‖L2[t0,T]≤γ⋆‖w‖L2[t0,T] ∀T>0. □
To derive the sufficient conditions for the solvability of the first sub-problem, we define the value-function for the game V : X
V(t,x)=infu supw12∫Tt[‖z(τ)‖2−γ‖w(τ)‖2]dτ
and apply Theorem 2.4.2 from Chapter 2. Consequently, we have the following theorem.
Theorem 5.1.1 Consider the SFBNLHICP problem as a two-player zero-sum differential game with the cost functional (5.4). A pair of strategies (u⋆
J(u⋆,w)≤J(u⋆,w⋆)≤J(u,w⋆),
if the value-function V is C1 and satisfies the HJI-PDE (HJIE):
Next, to find the pair of feedback strategy (u⋆
H(x,p,u,w)=pT(f(x)+g1(x)w+g2(x)u)+12‖h1(x)+k12(x)u‖2−12γ2‖w‖2, |
(5.6) |
and search for a unique saddle-point (u⋆
H(x,p,u⋆,w)≤H(x,p,u⋆,w⋆)≤H(x,p,u,w⋆) |
(5.7) |
for each (u, w) and each (x, p), where p is the adjoint variable.
Since the function H(., ., ., .) is C2 in both u and w, the above problem can be solved by applying the necessary conditions for an unconstrained optimization problem. However, the only problem that might arise is if the coefficient matrix of u is singular. This more general problem will be discussed in Chapter 9. But in the meantime to overcome this problem, we need the following assumption.
Assumption 5.1.1 The matrix
R(x)=kT12(x)k12(x)
is nonsingular for all x ∈ X
Under the above assumption, the necessary conditions for optimality for u and w provided by the minimum (maximum) principle [175] are
∂H∂u(u⋆,w)=0, ∂H∂w(u,w⋆)=0
for all (u, w). Application of these conditions gives
u⋆(x,p) = −R−1(x)(gT2(x)p+kT12(x)h1(x)), |
(5.8) |
(5.9) |
Moreover, since by assumption R(.) is nonsingular and therefore positive-definite, and γ > 0, the above equilibrium-point is clearly an optimizer of J(u, w). Further, we can write
H(x,p,u,w)=H⋆(x,p)+12‖u−u⋆‖2R(x)−12γ2‖w−w⋆‖2, |
(5.10) |
where
H⋆(x,p)=H(x,p,u⋆(x,p),w⋆(x,p) )
and the notation ‖a‖ Q stands for aTQa for any a ∈ ℜn, Q ∈ ℜn×n. Substituting u⋆
Now assume that there exists a C1 positive-semidefinite solution V : X
p=VTx(x)
in (5.10) yields the identity:
H(x,VTx(x),w,u) = Vx(x)(f(x)+g1(x)w+g2(x)u)+12‖h1(x)+k12(x)u‖2−12γ2‖w‖2 =H⋆(x,VTx(x))+12‖u−u⋆‖2R(x)+12γ2‖w−w⋆‖2.
Finally, notice that for u = u⋆
H(x,VTx(x),w⋆,u⋆)= H⋆(x,VTx(x))
which is exactly the right-hand-side of (5.5), and for this equation to be satisfied, V(.) must be such that
(5.11) |
The above condition (5.11) is the time-invariant HJIE for the disturbance-attenuation problem. Integration of (5.11) along the trajectories of the closed-loop system with α(x) = u⋆(x,VTx(x))
V(x(T))−V(x0)≤12∫Tt0(γ2‖w‖2−‖z‖2)dt≥0 ∀w∈W.
This means J(u⋆
Assumption 5.1.2 The output vector h1(.) and weighting matrix k12(.) are such that
kT12(x)k12(x)=I
and
hT1(x)k12(x)=0
for all x ∈ X
Remark 5.1.2 The above assumption implies that there are no cross-product terms in the performance or cost-functional (5.4), and the weighting on the control is unity.
Under the above assumption 5.1.2, the HJIE (5.11) becomes
V(x)(x)f(x)+12V(x)(x)[1γ2g1(x)gT1(x)−g2(x)gT1(x)]VTx(x)+12hT1(x)h1(x)=0, V(0)=0, |
(5.12) |
and the feedbacks (5.8), (5.9) become
(5.13) |
(5.14) |
Thus, the above condition (5.12) together with the associated feedbacks (5.13), (5.14) provide a sufficient condition for the solvability of the state-feedback suboptimal H∞
On the other hand, let us consider the finite-horizon problem as defined by the cost functional (5.4) with T < ∞. Assuming there exists a time-varying positive-semidefinite C1 solution V : X
p=VTx(x,t),
then substituting in (5.8), (5.9) and the HJIE (5.5) under the Assumption 5.1.2, we have
(5.15) |
(5.16) |
where V satisfies the HJIE
Vt(x,t)+Vx(x,t)f(x)+12Vx(x,t)[1γ2g1(x)gT1(x)−g2(x)gT2(x)]VTx(x,t)+ 12hT(x)h1(x)=0, V(x,T)=0. |
(5.17) |
Therefore, the above HJIE (5.17) gives a sufficient condition for the solvability of the finite-horizon suboptimal H∞
Let us consider an example at this point.
Example 5.1.1 Consider the nonlinear system with the associated penalty function
˙x1 = x2˙x2 = −x1−12x32+x2w+uz = [x2u].
The HJIE (5.12) corresponding to this system and penalty function is given by
x2Vx1−x1Vx2−12x32Vx2+12x22(x22−γ2)γ2+12x22=0.
Let γ = 1 and choose
Vx1=x1, Vx2 = x2.
Then we see that the HJIE is solved with V(x)=12(x21+x22)
u⋆=−x2, w⋆=x22.
It is also interesting to notice that the above solution V to the HJIE (5.12) is also a Lyapunov-function candidate for the free system: ˙x1=x2,˙x2=−x1−12x32.
Next, we consider the problem of asymptotic-stability for the closed-loop system (5.3), which is part (ii) of the problem. For this, let
α(x)=u⋆(x)=−gT2(x)VTx(x),
where V(.) is a smooth positive-semidefinite solution of the HJIE (5.12). Then differentiating V along the trajectories of the closed-loop system with w = 0 and using (5.12), we get
˙V(x) =Vx(x)(f(x)−g2(x)gT2(x)Vx(x)) =−12‖u⋆‖ 2−12γ2‖w⋆‖2−12hT(x)h1(x)≤0,
where use has been made of the HJIE (5.12). Therefore, ˙V
Definition 5.1.4 The nonlinear system Σa is said to be locally zero-state detectable if there exists a neighborhood U ⊂X
Thus, if we assume the system Σa to be locally zero-state detectable, then it is seen that for any trajectory of the system x(t) ∈ U
The above result is summarized as the solution to the state-feedback H∞
Definition 5.1.5 A nonnegative function V : X
Theorem 5.1.2 Consider the nonlinear system Σa and the SFBNLHICP for the system. Assume the system is smoothly-stabilizable and locally zero-state detectable in N ⊂ X
(5.18) |
solves the SFBNLHICP locally in N. If in addition Σa is globally zero-state detectable and V is proper, then u⋆
Proof: The first part of the theorem has already been proven in the above developments. For the second part regarding global asymptotic-stability, note that, if V is proper, then V is a global solution of the HJIE (5.11), and the result follows by application of LaSalle’s invariance-principle from Chapter 1 (see also the References [157, 268]). □
The existence of a C2 solution to the HJIE (5.12) is related to the existence of an invariant-manifold for the corresponding Hamiltonian system:
XH⋆γ:{dxdt = ∂H⋆γ(x,p)∂pdpdt = −∂H⋆γ(x,p)∂x, |
(5.19) |
where
H⋆γ(x,p)=pTf(x)+12pT[1γ2g1(x)gT1(x)−g2(x)gT2(x)]P+12hT1(x)h1(x).
It can be seen then that, if V is a C2 solution of the Isaacs equation, then differentiating H⋆
(∂H⋆γ∂x)p=VTx+(∂H⋆γ∂p)p=VTx∂VTx∂x=0,
and since the Hessian matrix
∂VTx∂x
is symmetric, it implies that the submanifold
(5.20) |
is invariant under the flow of the Hamiltonian vector-field XH⋆γ
(∂H⋆γ∂x)p=VTx=−(∂H⋆γ∂p)p=VTx∂VTx∂x.
The above developments have considered the SFBNLHICP from a differential games perspective. In the next section, we consider the same problem from a dissipative point of view.
Remark 5.1.3 With p=VTx(x)
Let us now specialize the results of Theorem 5.1.2 to the linear system
Σl:{˙x = Fx+G1w+G2u; x(0) =x0z = [H1(x) u] , |
(5.21) |
where F ∈ ℜn×n, G1 ∈ ℜn×r, G2 ∈ ℜn×p, and H1 ∈ ℜm×n are constant matrices. Also, let the transfer function w ↦ z be Tzw, and assume x(0) = 0. Then the H∞
‖Tzw‖∞≜ sup0≠w∈L2[0,∞)‖z‖2‖w‖2.
We then have the following corollary to the theorem.
Corollary 5.1.1 Consider the linear system (5.21) and the SFBNLHICP for it. Assume (F, G2) is stabilizable and (H1, F) is detectable. Further, suppose for some γ > 0, there exists a symmetric positive-semidefinite solution P ≥ 0 to the algebraic-Riccati equation (ARE):
FTP+PF+P[1γ2G1GT1−G2GT2]P+HT1H1=0. |
(5.22) |
Then the control law
u=−GT2Px
solves the SFBNLHICP for the system Σl, i.e., renders its H∞
Remark 5.1.4 Note that the assumptions (F, G2) stabilizable and (H1, F ) detectable in the above corollary actually guarantee the existence of a symmetric solution P ≥ 0 to the Riccati equation (5.22) [292]. Moreover, any solution P = PT ≥ 0 of (5.22) is stabilizing.
Remark 5.1.5 Again, the assumption (H1, F) detectable in the corollary can be replaced by the linear equivalent of the zero-state detectability assumption for the nonlinear case, which is
rank(A−jωIG2HI)=n+m ∀ω∈ℜ.
This condition also means that the system does not have a stable unobservable mode on the jω-axis.
The converse of Corollary 5.1.1 also holds, and is stated in the following theorem which is also known as the Bounded-real lemma [160].
Theorem 5.1.3 Assume (H1, F) is detectable and let γ > 0. Then there exists a linear feedback-control
u=K x
such that the closed-loop system (5.21) with this feedback is asymptotically-stable and has ℒ2
σ(F−G2GT2P+1γ2G1GT1P)⊂C−,
where σ(.) denotes the spectrum of (.), then ‖Tzw‖∞<γ
In this section, we reconsider the SFBNLHICP for the affine nonlinear system (5.1) from a dissipative system’s perspective developed in Chapter 3 (see also [131, 223]). In this respect, the first part of the problem (subproblem (i)) can be regarded as that of finding a static state-feedback control function u = α(x) such that the closed-loop system (5.3) is rendered dissipative with respect to the supply-rate
s(w(t),z(t))=12(γ2‖w(t)‖2−‖z(t)‖2)
and a suitable storage-function. For this purpose, we first recall the following definition from Chapter 3.
Definition 5.1.6 The nonlinear system (5.1) is locally dissipative with respect to the supply-rate s(w,z)=12(γ2‖w‖2−‖z‖2)
V(x1)−V(x0)≤∫t1t012(γ2‖w(t)‖2−‖z(t)‖2)dt |
(5.23) |
is satisfied for all w ∈ ℒ2
Remark 5.1.6 Rewriting the above dissipation-inequality (5.23) as (since V ≥ 0)
12∫t1t0‖z(t)‖2dt≤12∫t1t0γ2‖w(t)‖2dt+V(x0)
and allowing t1 → ∞, it immediately follows that dissipativity of the system with respect to the supply-rate s(w, z) implies finite ℒ2
We can now state the following proposition.
Proposition 5.1.2 Consider the nonlinear system (5.3) and the the SFBNLHICP using static state-feedback control. Suppose for some γ > 0, there exists a smooth solution V ≥ 0 to the HJIE (5.12) or the HJI-inequality:
Vx(x)f(x)+12Vx(x)[1γ2g1(x)gT1(x)−g2(x)gT2(x)]VTx(x)+12hT1(x)h1(x)≤0, V(0)=0, |
(5.24) |
in N ⊂X
Proof: The equivalence of the solvability of the HJIE (5.12) and the inequality (5.24) has been shown in Chapter 3. For the local disturbance-attenuation property, rewrite the HJ-inequality as
Integrating now the above inequality from t = t0 to t = t1 > t0, and starting from x(t0), we get
V(x(t1))−V(x(t0))≤∫t1t012(γ2‖w‖2−‖z⋆‖2)dt, x(t0),x(t1)∈N,
where z⋆=[h1(x) u⋆]
Remark 5.1.7 Note that the inequality (5.25) is obtained whether the HJIE is used or the HJI-inequality is used.
To prove asymptotic-stability for the closed-loop system, part (ii) of the problem, we have the following theorem.
Theorem 5.1.4 Consider the nonlinear system (5.3) and the SFBNLHICP. Suppose the system is smoothly-stabilizable, zero-state detectable, and the assumptions of Proposition 5.1.1 hold for the system. Then the control law (5.18) renders the closed-loop system (5.3) locally asymptotically-stable in N with w = 0 and therefore solves the SFBNLHICP for the system locally in N. If in addition the solution V ≥ 0 of the HJIE (or inequality) is proper, then the system is globally asymptotically-stable with w = 0, and the problem is solved globally.
Proof: Substituting w = 0 in the inequality (5.25), it implies that ˙V(t) ≤ 0
We consider another example.
Example 5.1.2 Consider the nonlinear system defined on the half-space N12={x=x1 > 12x2}
˙x1= −14x21−x222x1−x2+w˙x2 = x2+w+uz =[x1 x2 u]T.
The HJI-inequality (5.24) corresponding to this system for γ = √2
( −14x21−x222x1−x2)Vx1+(x2)Vx2+14V2x1+12Vx1Vx2−14V2x2+12(x21+x21)≤0.
Then, it can be checked that the positive-definite function
V(x)=12x21+12(x1−x2)2
globally solves the above HJI-inequality in N with γ = √2
u=x1−x2
asymptotically stabilizes the system over N12
Next, we investigate the relationship between the solvability of the SFBNLHICP for the nonlinear system Σa and its linearization about x = 0:
ˉΣl : {˙ˉx = F ˉx+G1ˉw+G2ˉu; ˉx(0)=ˉx0ˉz = [H1ˉx ˉu] |
(5.26) |
where F =∂f∂x(0) ϵ ℜn×n, G1 = g1(0) ϵ ℜn×r, G2= g2(0) ϵ ℜn×p, H1 = ∂f∂x(0), and ū ϵℜp, ˉx ϵ ℜn, ˉw ϵ ℜr. A number of interesting results relating the ℒ2-gain of the linearized system Σl and that of the system ˉΣa can be concluded [264]. We summarize here one of these results.
Theorem 5.1.5 Consider the linearized system ˉΣl, and assume the pair (H1, F ) is detectable [292]. Suppose there exists a state-feedback ˉu = K ˉx for some p × n matrix K, such that the closed-loop system is asymptotically-stable and has ℒ2-gain from ˉw to ˉz less than γ > 0. Then, there exists a neighborhood O of x = 0 and a smooth positivesemidefinite function V:O→ℜ that solves the HJIE (5.12). Furthermore, the control law u⋆ = −g2(x)VTx(x) renders the ℒ2-gain of the closed-loop system (5.3) less than or equal to γ in O.
We defer a full study of the solvability and algorithms for solving the HJIE (5.12) which are crucial to the solvability of the SFBNLHICP, to a later chapter. However, it is sufficient to observe that, based on the results of Theorems 5.1.3 and 5.1.5, it follows that the existence of a stabilizing solution to the ARE (5.22) guarantees the local existence of a positive-semidefinite solution to the HJIE (5.12). Thus, any necessary condition for the existence of a symmetric solution P ≥ 0 to the ARE (5.22) becomes also necessary for the local existence of solutions to (5.11). In particular, the stabilizability of (F, G2) is necessary, and together with the detectability of (H1, F ) are sufficient. Further, it is well known from linear systems theory and the theory of Riccati equations [292, 68] that the existence of a stabilizing solution P = P T to the ARE (5.22) implies that the two subspaces
X−(ˉH⋆γ) and I m[0I]
are complementary and the Hamiltonian matrix
ˉH⋆γ=[F(1γ2G1GT1−G2GT2)−HTH−FT]
does not have imaginary eigenvalues, where X−(ˉH⋆γ) is the stable eigenspace of ˉH⋆γ. Translated to the nonlinear case, this requires that the stable invariant-manifold M− of the Hamiltonian vector-field XH⋆γ through (x,VTx(x))=(0,0) (which is of the form (5.20)) to be n-dimensional and tangent to X−(ˉH⋆γ) :=span[Ip] at (x, VxT) = (0, 0), and the matrix ˉH⋆γ corresponding to the linearization of H⋆γ does not have purely imaginary eigenvalues. The latter condition is referred to as being hyperbolic and this situation will be regarded as the noncritical case. Thus, the detectability of (H1, F ) excludes the condition that ˉH⋆γ has imaginary eigenvalues, but this is not necessary. Indeed, the HJIE (5.12) can also have smooth solutions in the critical case in which the Hamiltonian matrix ˉH⋆γ is nonhyperbolic. In this case, the manifold M is not entirely the stable-manifold, but will contain a nontrivial center-stable manifold.
Proof: (of Theorem 5.1.5): By Theorem 5.1.3 there exists a solution P ≥ 0 to (5.22). It follows that the stable invariant manifold M− is tangent to X−(ˉH⋆γ) at (x, p) = (0, 0). Hence, locally about x = 0, there exists a smooth solution V− to the HJIE (5.12) satisfying ∂2V−∂x2(0) = P. In addition, since F − G2GT2P is asymptotically-stable, the vector-field f − g2gT2∂V−∂x is asymptotically-stable. Rewriting the HJIE (5.12) as
V−x(x)(f(x)−g2(x)gT2(x)V−Tx(x))+12V−x(x)[1γ2g1(x)gT1(x)+g2(x)gT2(x)]V−Tx(x)+ 12hT1(x)h1(x)=0,
it implies by the Bounded-real lemma (Chapter 3) that locally about x = 0, V − ≥ 0 and the closed-loop system has ℒ2-gain ≤ γ for all w ∈ W such that x(t) remains in O. □
In the next section, we discuss controller parametrization.
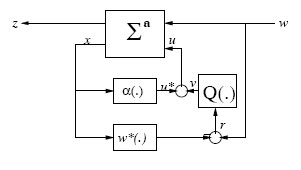
FIGURE 5.2
Controller Parametrization for FI-State-Feedback Nonlinear H∞ -Control
5.1.2 Controller Parametrization
In this subsection, we discuss the state-feedback H∞ controller parametrization problem which deals with the problem of specifying a set (or all the sets) of possible state-feedback controllers that solves the SFBNLHICP for the system (5.1) locally.
The basis for the controller parametrization we discuss is the Youla (or Q)-parametrization for all stabilizing controllers for the linear problem [92, 195, 292] which has been extended to the nonlinear case [188, 215, 214]. Although the original Youla-parametrization uses coprime factorization, the modified version presented in [92] does not use coprime-factorization. The structure of the prametrization is shown in Figure 5.2. Its advantage is that it is given in terms of a free parameter which belongs to a linear space, and the closed-loop map is affine in this free parameter. Thus, this gives an additional degree-of-freedom to further optimize the closed-loop maps in order to achieve other design objectives.
Now, assuming Σa is smoothly-stabilizable and the disturbance signal w ∈ ℒ2[0, ∞) is fully measurable, also referred to as the full-information (FI) structure, then the following proposition gives a parametrization of a family of full-information controllers that solves the SFBNLHICP for Σa.
Proposition 5.1.3 Assume the nonlinear system Σa is smoothly stabilizable and zero-state detectable. Suppose further, the disturbance signal is measurable and there exists a smooth (local) solution V ≥ 0 to the HJIE (5.12) or inequality (5.24) such that the SFBNLHICP is (locally) solvable. Let ℱG denote the set of finite-gain (in the ℒ2 sense) asymptotically-stable (with zero input and disturbances) input-affine nonlinear plants, i.e.,
ℱG≜{Σa|Σa(u=0,w=0) is asymptotically-stable and has ℒ2−gain≤γ}.
Then, the set
(5.27) |
is a paremetrization of all FI-state-feedback controllers that solves (locally) the SFBNLHICP for the system Σa.
Proof: Apply u ∈ KFI to the system Σa resulting in the closed-loop system:
∑au⋆(Q) :{˙x = f(x)+g1(x)w+g2(x)(u⋆+Q(w−w⋆)); x(0)=x0z = [h1(x) u]. |
(5.28) |
If Q = 0, then the result follows from Theorem 5.1.2 or 5.1.4. So assume Q ≠ 0, and since Q∈ℱG, r ≜ Q(w−w⋆) ∈ ℒ2[0,∞). Let V ≥ 0 be a (local) solution of (5.12) or (5.24) in N for some γ > 0. Then, differentiating this along a trajectory of the closed-loop system, completing the squares and using (5.12) or (5.24), we have
ddtV = Vx[f+g1w−g2gT2VTx+g2r] = Vxf+12Vx[1γ2g1gT1−g2gT2]VTx+12‖h1‖2−12‖h1‖2− γ22‖w−1γ2gT1VTx‖2+12γ2‖w‖2−12‖r−gT2VTx(x)‖2+12‖r‖2 ≤ 12γ2‖w‖2−12‖h1‖2−12‖u‖2+12‖r‖2−γ22‖w−1γ2gT1VTx‖2. |
(5.29) |
Now, integrating the above inequality (5.29) from t = t0 to t = t1 > t0, starting from x(t0) and using the fact that
∫t1t0‖r‖2dt≤γ2∫t1t0‖w−w⋆‖2dt ∀t1≥t0, ∀w∈W ,
we get
(5.30) |
This implies that the closed-loop system (5.28) has ℒ2-gain ≤ γ from w to z. Finally, the part dealing with local asymptotic-stability can be proven as in Theorems 5.1.2, 5.1.4. □
Remark 5.1.8 Notice that the set ℱG can also be defined as the set of all smooth inputaffine plants Q : r ↦ v with the realization
(5.31) |
where ξ ∈X, a :X→V∞(X), b :X→ℳn×p, c:X→ℜm are smooth functions, with a(0) = 0, c(0) = 0, and such that there exists a positive-definite function φ:X→ℜ+ satisfying the bounded-real condition:
φξ(ξ)a(ξ)+12γ2φξ(ξ)b(ξ)bT(ξ)φTξ(ξ)+12cT(ξ)c(ξ)=0.
5.2 State-Feedback Nonlinear H∞ Tracking Control
In this section, we consider the traditional state-feedback tracking, model-following or servomechanism problem. This involves the tracking of a given reference signal which may be any one of the classes of reference signals usually encountered in control systems, such as steps, ramps, parabolic or sinusoidal signals. The objective is to keep the error between the system output y and the reference signal arbitrarily small. Thus, the problem can be treated in the general framework discussed in the previous section with the penalty variable z representing the tracking error. However, a more elaborate design scheme may be necessary in order to keep the error as desired above.
The system is represented by the model (5.1) with the penalty variable
(5.32) |
while the signal to be tracked is generated as the output ym of a reference model defined by
(5.33) |
xm ∈ ℜ l, fm : ℜl → V ∞(ℜl), hm : ℜl → ℜ m and we assume that this system is completely observable [212]. The problem can then be defined as follows.
Definition 5.2.1 (State-Feedback Nonlinear H∞ (Suboptimal) Tracking Control Problem (SFBNLHITCP)). Find if possible, a static state-feedback control function of the form
(5.34) |
No ⊂ X, Nm ⊂ ℜl, for some smooth function αtrk, such that the closed-loop system (5.1), (5.34), (5.33) has, for all initial conditions starting in No × Nm neighborhood of (0, 0), locally ℒ2-gain from the disturbance signal w to the output z less than or equal to some prescribed number γ⋆ > 0 and the tracking error satisfies limt→∞{y − ym} = 0.
To solve the above problem, we follow a two-step procedure:
Step 1: Find a feedforward-control law u⋆ = u⋆(x,xm) so that the equilibrium point x = 0 of the closed-loop system
(5.35) |
is exponentially stable, and there exists a neighborhood U = No × Nm of (0, 0) such that for all initial conditions (x0, xm0) ∈ U the trajectories (x(t), xm(t)) of
(5.36) |
satisfy
limt→∞{h1(θ(xm(t)))−hm(xm(t))}=0.
To solve this step, we seek for an invariant-manifold
Mθ={x|x=θ(xm)}
and a control law u⋆ = αf(x,xm) such that the submanifold Mθ is invariant under the closed-loop dynamics (5.36) and h1(θ(xm(t))) − hm(xm(t)) ≡ 0. Fortunately, there is a wealth of literature on how to solve this problem [143]. Under some suitable assumptions, the following equations give necessary and sufficient conditions for the solvability of this problem:
(5.37) |
(5.38) |
where ˉu⋆(xm) = αf(θ(xm),xm) .
The next step is to design an auxiliary feedback control v so as to drive the system onto the above submanifold and to achieve disturbance-attenuation as well as asymptotic tracking. To formulate this step, we consider the combined system
(5.39) |
and introduce the following change of variables
ξ = x−θ(xm)
υ = u−ˉu⋆(xm).
Then
˙ξ = F(ξ,xm)+G1(ξ,xm)w+G2(ξ,xm)υ
˙xm = fm(xm)
where
F(ξ,xm) = f(ξ+θ(xm))−∂θ∂xm(xm)fm(xm)+g2(ξ+θ(xm))ˉu⋆(xm)G1(ξ,xm) = g1(ξ+θ(xm))G2(ξ,xm) = g2(ξ+θ(xm)).
Similarly, we redefine the tracking error and the new penalty variable as
˜z=[h1(ξ+θ(xm))−hm(xm) υ].
Step 2: Find an auxiliary feedback control υ⋆= υ⋆(ξ,xm) so that along any trajectory (ξ(t), xm(t)) of the closed-loop system (5.40), the ℒ2-gain condition
∫Tt0 ‖˜z(t)‖2dt≤ γ2∫Tt0‖w(t)‖2dt+κ(ξ(t0),xm0)⇔∫Tt0{‖h1(ξ+θ(xm))−hm(xm)‖2+‖υ‖2}dt≤γ2∫Tt0‖w(t)‖2dt+κ(ξ(t0),xm0)
is satisfied for some function κ, for all w ∈W, for all T < ∞ and all initial conditions (ξ(t0), xm0) in a neighborhood ˉNo × Nm of the origin (0, 0). Moreover, if ξ(t0) = 0 and w(t) ≡ 0, then we may set υ⋆(t)≡0 to achieve perfect tracking.
Clearly, the above problem is now a standard state-feedback H∞-control problem, and the techniques discussed in the previous sections can be employed to solve it. The following theorem then summarizes the solution to the SFBNLHITCP.
Theorem 5.2.1 Consider the nonlinear system (5.1) and the SFBNLHITCP for this system. Suppose the control law u⋆ = u⋆(x,xm) and invariant-manifold Mθ can be found that solve Step 1 of the solution to the tracking problem. Suppose in addition, there exists a smooth solution Ψ : ˉNo × Nm → ℜ, Ψ(ξ,xm) ≥ 0 to the HJI-inequality
Ψξ(ξ,xm)F(ξ,xm)+Ψxm(ξ,xm)fm(xm)+ 12Ψξ(ξ,xm)[1γ2G1(ξ,xm)GT1(ξ,xm)−G2(ξ,xm)GT2(ξ,xm)]ΨTξ(ξ,xm)+12‖h1(ξ+xm)−hm(xm)‖2≤0, x∈ˉNo,ξ∈Nm, Ψ(0,0)=0. |
(5.40) |
Then the SFBNLHITCP is locally solvable with the control laws u = ˉu⋆ and
υ⋆=−GT2(ξ,xm)ΨTξ(ξ,xm).
Moreover, if Ψ is proper with respect to ξ (i.e., if Ψ(ξ, xm) → ∞ when ‖ξ‖ → ∞) and the system is zero-state detectable, then limt →∞ ξ(t) = 0 also for all initial conditions (ξ(t0),xm0) ∈ ˉN0 × Nm.