2.20. REVIEW OF MATRIX ALGEBRA
The classical methods of describing a linear system by means of transfer functions, block diagrams, and signal-flow graphs have thus far been presented in this chapter. An inherent characteristic of this type of representation is that the system dynamics are described by definable input-output relationships. Disadvantages of these techniques, however, are that the initial conditions have been neglected and intermediate variables lost. The method cannot be used for nonlinear, or time-varying systems. Furthermore, working in the frequency domain is not convenient for applying modern optimal control theory, discussed in Chapter 6 of the accompanying volume, which is based on the time domain. The use of digital computers also serves to focus on time-domain methods. Therefore, a different set of tools for describing the system in the time domain is needed and is provided by state-variable methods. As a necessary preliminary, matrix algebra is reviewed in this section [5, 10].
A matrix A is a collection of elements arranged in a rectangular or square array defined by
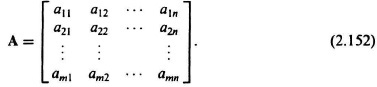
The order of a matrix is defined as the total number of rows and columns of the matrix. For example, a matrix having m rows and n columns is referred to as an m × n matrix. A square matrix is one for which m = n. A column matrix, or vector, is one for which n = 1, and is represented in the following manner:

A row matrix or row vector is one that has one row and more than one column (e.g., a 1 × n matrix). Capital letters are used to denote matrices and lower-case letters to denote vectors. Matrix A equals matrix B if element aij equals element bij for each i and each j, where the subscripts refer to elements in row i and column j of the respective matrices.
Before the basic types of properties of matrices are presented, let us note the differences between a matrix and a determinant. First, a matrix is an array of numbers or elements having m rows and n columns, while a determinant is an array of numbers or elements with m rows and n columns and is always square (m = n). The second major difference is that a matrix does not have a value while a determinant has a value. In addition, note that a square matrix (m = n) has a determinant. A matrix is said to be singular if the value of its determinant is zero.
In order to present the basic types and properties of matrices, matrix A will be considered in the following discussion where the representative element is aij.
A. Identity Matrix
The identity matrix, or unit matrix, is a square matrix whose principal diagonal elements are unity, all other elements being zero. This matrix, which is denoted by I, is given by

An interesting property of the identity matrix is that multiplication of any matrix A by an identity matrix I results in the original matrix A:
where matrix multiplication is defined later on.
B. Diagonal Matrix
A diagonal matrix, which is denoted by diag xi, is given by

C. Transpose of a Matrix
A matrix is transposed by interchanging its rows and columns. To form the transpose of a matrix, element aij, which is the element of row i and column j, is interchanged with element aji, which is the element of row j and column i, for all i and j. For example, the transpose A, where

is written as AT, where

Note that the transpose of AT is (AT)T = A.
D. Symmetric Matrix
A symmetric matrix is defined by the condition
This matrix, which is denoted by As, is represented by
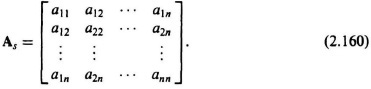
Notice that it is symmetrical about the principal diagonal, and that a symmetric matrix and its transpose are identical.
E. Skew-Symmetric Matrix
A skew-symmetric matrix is defined by the condition
This matrix, which is denoted by Aa, is represented by
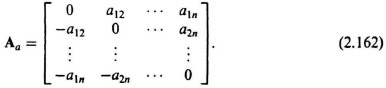
Note that a skew-symmetric matrix is equal to the negative of its transpose.
F. Zero Matrix
The zero matrix or null matrix, denoted by 0, is defined as the matrix whose elements are all zero. It has the property that
where addition of matrices is defined later on.
G. Adjoint Matrix
The adjoint of a square matrix is formed by replacing each element of the matrix by its corresponding cofactor, and then transposing the result. For example, if a matrix A is given by

then the cofactors of the elements a11, a21 are given, respectively, by the determinants
The element aij has for its cofactor Aij with the proper algebraic sign, (−1)i+j, prefixed. The new matrix formed by replacing the original elements in the matrix with their corresponding cofactors is given by

The transpose of this matrix results in the expression for the adjoint (adj) of matrix A:

In order to present the basic operations of matrix analysis, three matrices A, B, and C will be considered in the following discussion where the representative elements are denoted by aij, bij, cij.
H. Addition or Subtraction
The sum (or difference) of two matrices A and B with the same numbers of rows and columns is obtained by adding (or subtracting) corresponding elements. The result is a new matrix C, where
and
For example, if matrices A and B are given by

then the sum of matrix A and matrix B is given by

I. Multiplication of a Matrix by a Scalar
Multiplication of a matrix A by a scalar d is equivalent to multiplying each element of the matrix by d. The result is a new matrix C, where
and
For example, if matrix A is given by
then the multiplication of matrix A by scalar d is given by
J. Multiplication of Two Matrices
Postmultiplication* of matrix A by matrix B results in a new matrix C, where
and
These equations state that the result of postmultiplication of matrix A by matrix B is a matrix C whose element located in row i and column j is obtained by multiplying each element in row i of matrix A by the corresponding element in column j of matrix B and then adding the results. It is important to note that the number of columns in matrix A must equal the number of rows in matrix B so that matrices A and B may be multiplied together. For example, if matrices A and B are given by

then the product of matrices A and B is given by

Matrix multiplication is associative and distributive with respect to addition, but in general not commutative:
K. Inverse of a Square Matrix
The inverse of a square matrix B is denoted by B−1 and has the property
It can be shown that the product of an adjoint matrix with the matrix itself has the property that it is equal to the product of an indentity matrix and the determinant of the matrix:
Using these two relationships, we can derive the expression for the inverse matrix B−1. By solving for I from Eq. (2.185), the following relationship is obtained:
Using Eqs. (2.184) and (2.186), we obtain
Solving for the inverse matrix B−1 in terms of the adjoint matrix and the determinant of the matrix, we obtain the following expression:
or
Note that B−1 does not exist if |B| = 0, although Eq. (2.185) still holds.
L. Differentiation of a Matrix
The usual concepts regarding the differentiation of scalar variables carry over to the differentiation of a matrix. Let A be an m × n matrix whose elements aij(t) are differentiable functions of the scalar variable t. The derivative of A with respect to the variable t is given by

In addition, the derivative of the sum of two matrices is the sum of the derivatives of the matrices:
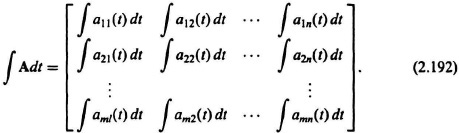
M. Integration of a Matrix
The usual concepts regarding the integration of scalar variables also carry over to the integration of a matrix. Again, let A be an m × n matrix whose elements aij(t) are integrable functions of the scalar variable t. The integration of A with respect to the variable t is given by