
2.15 REDUCTION OF THE SIGNAL-FLOW GRAPH
Several preliminary simplifications can be made to the complex signal-flow graphs of a system by means of the following signal-flow graph algebra.
(a) Addition
1. The signal-flow graph in Figure 2.13a represents the linear equation
2. The signal-flow graph in Figure 2.13b represents the linear equation
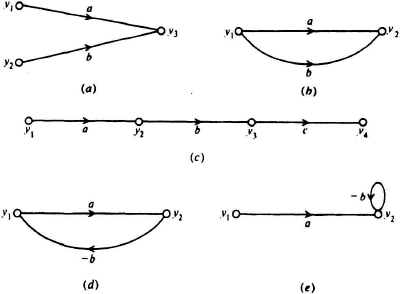
Figure 2.13 Signal-flow graph algebra.
(b) Multiplication. The signal-flow graph in Figure 2.13c represents the linear equation
(c) Feedback loops
1. The signal-flow graph in Figure 2.13d represents the linear equation
2. The signal-flow graph in Figure 2.13e represents the linear equation
It is possible to apply the preceding signal-flow graph algebra to a complicated graph and reduce it to one containing only a source and a sink. This process requires repeated applications until the final desired form is obtainable. An interesting property of network and system topology, based on Mason’s theorem [7, 8] permits the writing of the desired answer almost by inspection. The general expression for signal-flow graph gain G is given by
where
Δ = 1 − ΣL1 + ΣL2 − ΣL3 + ... + (−1)m ΣLm
L1 = gain of each closed loop in the graph
L2 = product of the loop gains of any two nontouching closed loops (loops are considered nontouching if they have no node in common)
. . . . . . . . . . . . . . . . . . .
Lm = product of the loop gains of any m nontouching loops
GK = gain of the Kth forward path
ΔK = the value of Δ for that part of the graph not touching the Kth forward path (value of Δ remaining when the path producing GK is removed).
Δ is known as the determinant of the graph and ΔK is the cofactor of the forward path K. Basically, Δ consists of the sum of the products of loop gains taken none at a time (1), one at a time (with a minus sign), two at a time (with a plus sign), etc.; ΔK contains the portion of Δ remaining when the path producing GK is removed. The proof of this general gain expression is contained in Reference [8]. A few examples follow in order to show how this expression may be used.
Example 1. For Figure 2.14a,
Δ = 1 − bd,
G1 = abc,
Δ1 = 1.
Therefore,
![]()
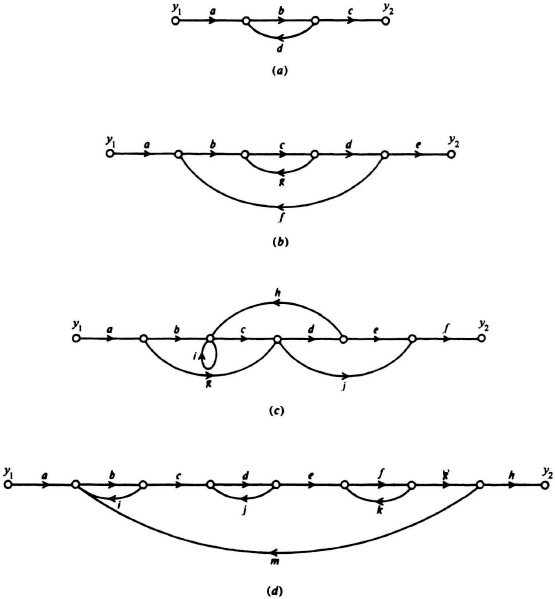
Figure 2.14 Signal-flow graph examples: (a) Example 1, (b) Example 2, (c) Example 3, (d) Example 4.
Example 2. For Figure 2.14b,
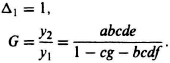
Δ = 1 − cg − bcdf
G1 = abcde.
Therefore,
Example 3. For Figure 2.14c,
Δ = 1 – (i + cdh),
G1 = abcdef,
G2 = agdef,
G3 = agjf,
G4 = abcjf,
Δ1 = 1, Δ3 = 1 – i,
Δ2 = 1 – i, Δ4 = 1.
Therefore,
![]()
Example 4. For Figure 2.14d,
Δ = 1 − (bi + dj + fk + bcdefgm) + (bidj + bifk + djfk) – bidjfk,
G1 = abcdefgh,
Δ1 = 1.
Therefore,
![]()