
6.13. CLOSED-LOOP FREQUENCY BANDWIDTH AND CUTOFF FREQUENCY
Let us consider the closed-loop frequency response shown in Figure 6.46 and 6.51b so that we can define the closed-loop frequency bandwidth and cutoff frequency. We define the bandwidth of a closed-loop control system in a manner similar to other electronic equipment such as amplifiers. The bandwidth of a closed-loop control system is defined as the frequency range where the magnitude of the closed loop gain does not drop below −3 dB as shown in Figure 6.54. Therefore, the bandwidth of the control system, ωB, is defined to be that frequency range in which the magnitude of the closed-loop frequency response is greater than −3 dB. The frequency ωB is defined as the cutoff frequency. At frequencies greater than ωB, the closed-loop frequency response is attenuated by more than −3 dB.
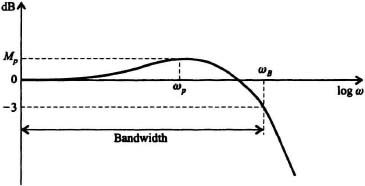
Figure 6.54 Closed-loop frequency response of a control system indicating the bandwidth and the cutoff frequency, ωB.
The question arises as to the desired bandwidth and cutoff frequency of a control system. We would like to have a very large bandwidth so that we can reproduce the input signal (external forcing function) very accurately. Unfortunately, very large bandwidths pass high-frequency noise which can be a detriment to the control-system performance. Therefore, there are conflicting requirements on the bandwidth and cutoff frequency, and a tradeoff is necessary in order to achieve a good design.