Noise means an unwanted signal. Image/video noise means unwanted variations in intensity (for grayscale image) or colors (for color images) that are not present in the real object being photographed or recorded. Image noise is a form of electronic disruption and could come from many sources, such as camera sensors and circuitry in digital or analog cameras. Noise in digital cameras is equivalent to the film grain of analog cameras. Though some noise is always present in any output of electronic devices, a high amount of image noise considerably degrades the overall image quality, making it useless for the intended purpose. To represent the quality of the electronic output (in our case, digital images), the mathematical term signal-to-noise ratio (SNR) is a very useful term. Mathematically, it's defined as follows:

In the following concepts and their implementations, we are going to use kernels. Kernels are square matrices used in image processing. We can apply a kernel to an image to get different results, such as the blurring, smoothing, edge detection, and sharpening of an image. One of the main uses of kernels is to apply a low pass filter to an image. Low pass filters average out rapid changes in the intensity of the image pixels. This basically smoothens or blurs the image. A simple averaging kernel can be mathematically represented as follows:

For row = cols = 3, kernel will be as follows:

The value of the rows and columns in the kernel is always odd.
We can use the following NumPy code to create this kernel:
K=np.ones((3,3),np.uint32)/9
cv2.filter2D() function convolves the previously mentioned kernel with the image, thus applying a linear filter to the image. This function accepts the source image and depth of the destination image (-1 in our case, where -1 means the same depth as the source image) and a kernel. Take a look at the following code. It applies a 7 x 7 averaging filter to an image:
import cv2
importnumpy as np
frommatplotlib import pyplot as plt
img = cv2.imread('4.2.03.tiff',1)
input = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
output = cv2.filter2D(input,-1,np.ones((7,7),np.float32)/49)
plt.subplot(121),plt.imshow(input),plt.title('Input')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(output),plt.title('Output')
plt.xticks([]), plt.yticks([])
plt.show()The output will be a filtered image, as follows:

As discussed in the kernels section, low pass filters are excellent when it comes to removing sharp components (high frequency information) such as edges and noise and retaining low frequency information (so-called low pass filters), thus blurring or smoothening them.
Let's explore the low pass filtering functions available in OpenCV. We do not have to create and pass the kernel as an argument to these functions; instead, these functions create the kernel based on the size of the kernel we pass as the parameter.
cv2.boxFilter() function takes the image, depth, and size of the kernel as inputs and blurs the image. We can specify normalize as either True or False. If it's True, the matrix in the kernel would have  as its coefficient; thus, the matrix is called a normalized box filter. If
as its coefficient; thus, the matrix is called a normalized box filter. If normalize is False, then the coefficient will be 1, and it will be an unnormalized box filter. An unnormalized box filter is useful for the computing of various integral characteristics over each pixel neighborhood, such as covariance matrices of image derivatives (used in dense optical flow algorithms, and so on). The following code demonstrates a normalized box filter:
output=cv2.boxFilter(input,-1,(3,3),normalize=True)
The output of the code will be as follows, and it will have less smoothing than the previous one due to the size of the kernel matrix:

The cv2.blur() function directly provides the normalized box filter by accepting the input image and the kernel size as parameters without the need to specify the normalize parameter. The output for the following code will be exactly the same as the preceding output:
output = cv2.blur(input,(3,3))
As an exercise, try passing normalize as False for an unnormalised box filter to cv2.boxFilter() and view the output.
The cv2.GaussianBlur() function uses the Gaussian kernel in place of the box filter to be applied. This filter is highly effective against Gaussian noise. The following is the code that can be used for this function:
output = cv2.GaussianBlur(input,(3,3),0)
Note
You might want to read more about Gaussian noise at http://homepages.inf.ed.ac.uk/rbf/HIPR2/noise.htm.
The following is the output of the earlier code where the input is the image with Gaussian noise and the output is the image with removed Gaussian noise.

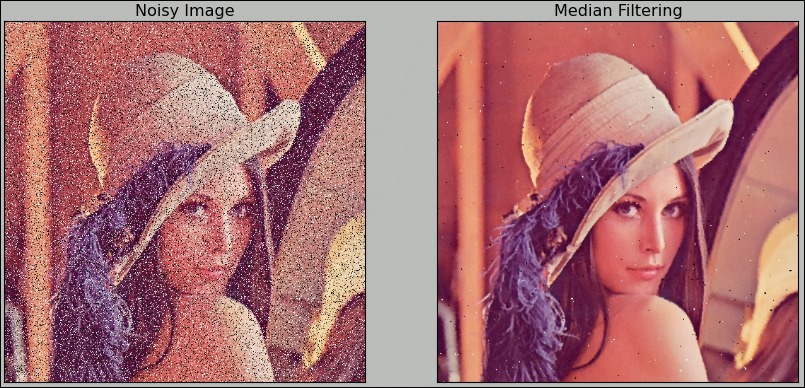
cv2.medianBlur() is used for the median blurring of the image using the median filter. It calculates the median of all the values under the kernel, and the center pixel in the kernel is replaced with the calculated median. In this filter, a window slides along the image, and the median intensity value of the pixels within the window becomes the output intensity of the pixel being processed. This is highly effective against salt and pepper noise. We need to pass an input image and an odd positive integer (not the rows, columns tuple like the previous two functions) to this function. The following code introduces salt and pepper noise in the image and then applies cv2.medianBlur() to that in order to remove the noise:
import cv2
importnumpy as np
import random
frommatplotlib
import pyplot as plt
img = cv2.imread('lena_color_512.tif', 1)
input = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
output = np.zeros(input.shape, np.uint8)
p = 0.2# probablity of noise
fori in range(input.shape[0]):
for j in range(input.shape[1]):
r = random.random()
if r < p / 2:
output[i][j] = 0, 0, 0
elif r < p:
output[i][j] = 255, 255, 255
else :
output[i][j] = input[i][j]
noise_removed = cv2.medianBlur(output, 3)
plt.subplot(121), plt.imshow(output), plt.title('Noisy Image')
plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(noise_removed), plt.title('Median Filtering')
plt.xticks([]), plt.yticks([])
plt.show()You will find that the salt and pepper noise is drastically reduced and the image is much more comprehensible to the human eye.