
3.1. MULTILAYER ARTIFICIAL NEURAL NETWORKS ARCHITECTURE 25
Vehicle States
ANN-Based
Estimation Output
ANN-Based
Brake Pressure
Estimation Model
Updated Weight and Bias
Powertrain States
Brake Pressure
Ground Truth
Feed-Forward Neuron Network Training
Multilayer Neuron Networks Levenberg-Marquardt
Backpropagation
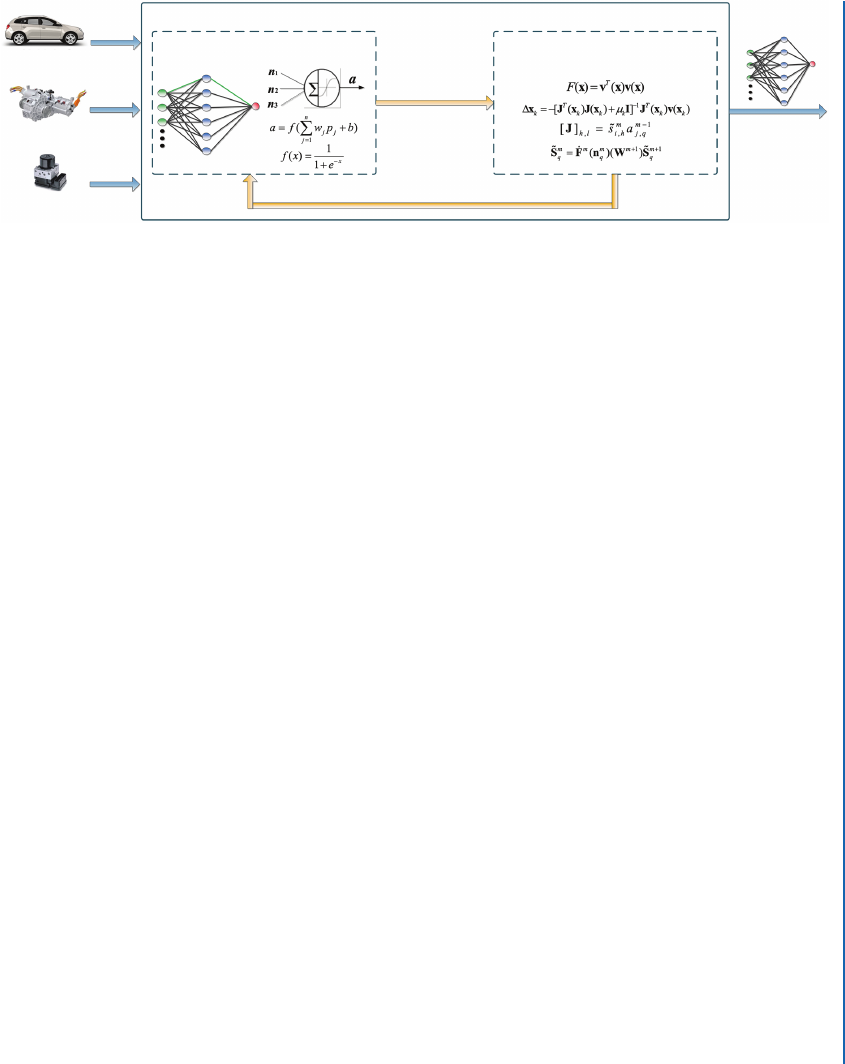
Figure 3.1: High-level architecture of the proposed brake pressure estimation algorithm based
on multilayer Artificial Neural Networks.
3.1 MULTILAYER ARTIFICIAL NEURAL NETWORKS
ARCHITECTURE
In order to achieve the objective of brake pressure estimation, multilayer artificial neural net-
works are first constructed with the input of vehicle and powertrain states. Details of the high-
level system architecture and structure of the component are described in this section.
3.1.1 SYSTEM ARCHITECTURE
e system architecture with proposed methodology is shown in Fig. 3.1. e multilayer arti-
ficial neural network receives state variables of the vehicle and the electric powertrain system
as inputs, and then yields the estimation of the brake pressure through the activation function.
e Levenberg–Marquardt Backpropagation algorithm is then operated with the performance
function, which is a function of the ANN-based estimation and the ground truth of brake pres-
sure. e weight and bias variables are adjusted according to Levenberg–Marquardt method,
and the backpropagation algorithm is used to calculate the Jacobian matrix of the performance
function with respect to the weight and bias variables. With updated weights and biases, the
ANN further estimates the brake pressure at the next time step. On the basis of the above it-
erative processes, the ANN-based brake pressure estimation model is well trained. e detailed
method and algorithms are introduced in the following subsection.
3.1.2 MULTILAYER FEED-FORWARD NEURAL NETWORK
In this work, a multilayer feed-forward neural network is chosen to estimate brake pressure. A
Feed-Forward Neural Network (FFNN) is composed of one input layer, one or more hidden
layers and one output layer. ince a neural network with one hidden layer has the capability to
handle most of the complex functions, in this work the FFNN with one hidden layer is con-
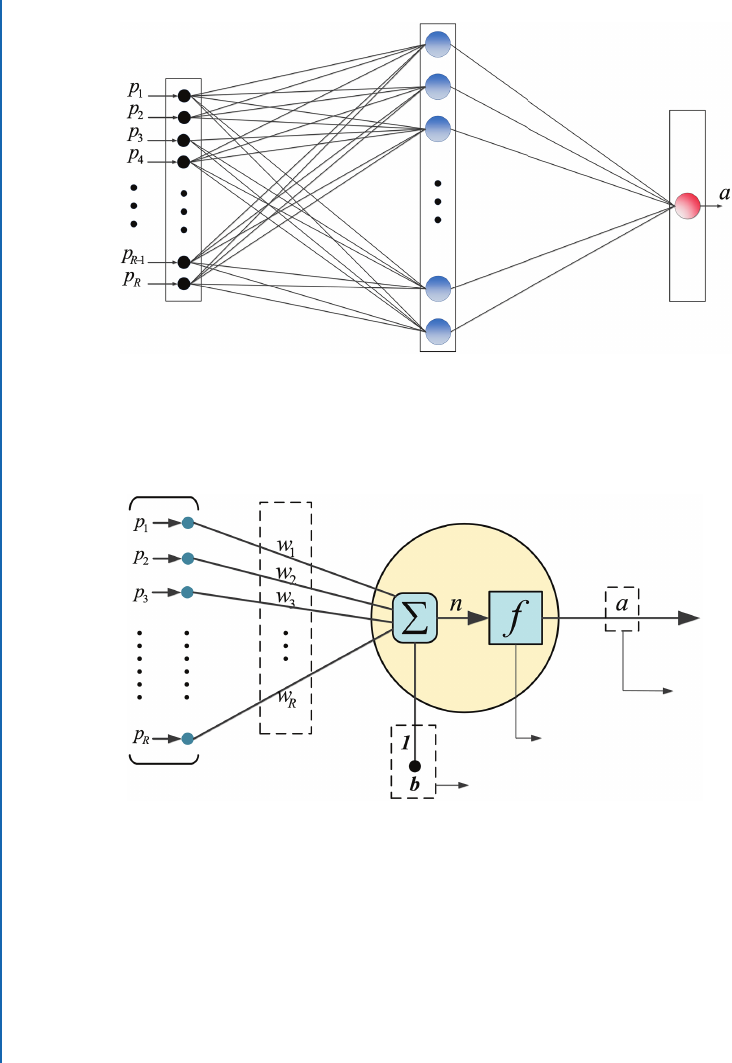
structed. Figure 3.2 shows the structure of a multilayer FFNN with one hidden layer.
26 3. STATE ESTIMATION OF CYBER-PHYSICAL VEHICLE SYSTEMS
Hidden Layer
Output Layer
Input Layer
Figure 3.2: Structure of the multilayer feed-forward neural network.
Input
Output
Bias
Activation Function
Weight Multi-Input Neuron
Figure 3.3: Structure of the multi-input neuron.
e basic element of a FFNN is the neuron, which is a logical-mathematical model that
seeks to simulate the behavior and functions of a biological neuron [66]. Figure 3.3 shows the
schematic structure of a neuron. Typically, a neuron has more than one input. e elements in
the input vector p D Œp
1
; p
2
; : : : ; p
R
are weighted by elements w
1
; w
2
; : : : ; w
j
of the weight
matrix W, respectively.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.