
Thanks to advances in computer technology, performance is no longer a concern for the majority of programs. However, many applications exist, particularly in the context of scientific computing, where performance is still important. In such cases, programs can be optimized to run faster by exploiting knowledge about the relative performance of different approaches.
This chapter examines the most important techniques for optimizing F# programs. The overall approach to whole program optimization is to perform each of the following steps in order:
Profile the program compiled with automated optimizations and running on representative input.
Of the sequential computations performed by the program, identify the most time-consuming one from the profile.
Calculate the (possibly asymptotic) algorithmic complexity of this bottleneck in terms of suitable primitive operations.
If possible, manually alter the program such that the algorithm used by the bottleneck has a lower asymptotic complexity and repeat from step 1.
If possible, modify the bottleneck algorithm such that it accesses its data structures less randomly to increase cache coherence.
Perform low-level optimizations on the expressions in the bottleneck.
The mathematical concept of asympotic algorithmic complexity (covered in section 3.1) is an excellent way to choose a data structure when inputs will be large, i.e. when the asymptotic approximation is most accurate. However, many programs perform a large number of computations on small inputs. In such cases, it is not clear which data structure or algorithm will be most efficient and it is necessary to gather quantitative data about a variety of different solutions in order to justify a design decision.
In its simplest form, performance can be quantified by simply measuring the time taken to perform a representative computation.
We shall now examine different ways to measure time and profile whole programs before presenting a variety of fundamental optimizations that can be used to improve the performance of many F# programs.
Before detailing the functions provided by F# and .NET to measure time, it is important to distinguish between two different kinds of time that can be measured.
Absolute time or real time, refers to the time elapsed in the real world, outside the computer.
CPU time is the amount of time that CPUs have spent performing a computation.
As a CPU's time is typically divided between many different programs, CPU time often passes more slowly than absolute time. For example, when two computations are running on a single CPU, each computation will see CPU time pass at half the rate of real time. However, if several CPUs collaborate to perform computation then the total CPU time taken may well be longer than the real time taken.
The different properties of absolute- and CPU-time make them suited to different tasks. When animating a visualization where the scene is a function of time, it is important to use absolute time otherwise the speed of the animation will be affected by other programs running on the CPU. When measuring the performance of a function or program, both absolute time and CPU time can be useful measures.
The .NET class System.Diagnostics . Stopwatch can be used to measure elapsed time with roughly millisecond (0.001s) accuracy. This can be productively factored into a time combinator that accepts a function f and its argument x and times how long f takes to run when it is applied to x, returning a 2-tuple of the time taken and the result of f x:
> let time f x =
let timer = new System.Diagnostics.Stopwatch()
timer.Start()
try f x finally
printf "Took %dms" timer.ElapsedMilliseconds;;
val time : ('a -> 'b) -> 'a -> float * 'bCPU time can be measured using a similar function.
The F# Sys .time function returns the CPU time consumed since the program began, and it can also be productively factored into a curried higher-order function cpu_time:
> let cpu_time f x =
let t = Sys.time()
try f x finally
printf "Took %fs" (Sys.time() -. t);;
val cpu_time : ('a -> 'b) -> 'a -> float * 'bCPU time can be measured with roughly centisecond (0.01s) accuracy using this function.
Many functions execute so quickly that they take an immeasurably small amount of time to run. In such cases, a higher-order loop function that repeats a computation many times can be used to provide a more accurate measurement:
> let rec loop n f x =
if n > 0 then
f x |> ignore
loop (n - 1) f x;;
val loop : int -> ('a -> 'b) -> 'a -> 'bFor example, extracting the llth element of a list takes a very short amount of time:
> time (List.nth 10) [1 .. 100];; Took 0ms val it : int = 11 > time (loop 1000000 (List.nth 10)) [1 .. 100];; Took 56 7ms val it : int = 11
The former timing only allows us to conclude that the real time taken to fetch the 10th element is < 0.001ms. The latter timing over a million repetitions allows us to conclude that the time taken is around 0.567µ s. The latter result is still erroneous because efficiency is often increased by repeating a computation (i.e. the first computation is likely to take longer than the rest) and the measurement did not account for the time spent in the loop function itself.
The time spent in the loop function can also be measured and turns out to be only 3% in this case:
> time (loop 1000000 (fun () -> ())) ();; Took 17ms val it : int = 11
The difference between real- and CPU-time is best elucidated by example.
The time and cpu_time combinators can be used to measure the absolute- and CPU-time required to perform a computation. In order to highlight the slower-passing of CPU time, we shall wrap the measurement of absolute time in a measurement of CPU time. Building a set from a sequence of integers is a suitable computation:
> cpu_time (time Set.of_seq) (seq {l .. 1000000});;
Took 4 719ms
Took 4.671875s
val it : Set<int> = seq [1; 2; 3; 4; ...]The inner timing shows that the conversion of a million-element list into a set took 4.791s of real time. The outer timing shows that the computation and the inner timing consumed 4.67s of CPU time. Note that the outer timing returned a shorter time span than the inner timing, as CPU time passed more slowly than real time because the CPU was shared among other programs.
Timing a variety of equivalent functions is an easy way to quantify the performance differences between them. Choosing the most efficient functions is then the simplest approach to writing high-performance programs. However, timing individual functions by hand is no substitute for the complete profiling of the time spent in all of the functions of a program.
Before beginning to optimize a program, it is vitally important to profile the program running on representative inputs in order to ascertain quantitative information on any bottlenecks in the flow of the program.
Although profiling is most useful when optimizing large programs that consist of many different functions, it is instructive to look at a simple example. Consider a program to solve the 8-queens problem. This is a logic problem commonly solved on computer science courses. The task is to find all of the ways that 8 queens can be placed on a chess board such that no queen attacks any other.
As this program makes heavy use of lists, it is useful to open the namespace of the List module:
> open List;;
A function safe that tests whether one position is safe from a queen at another position (and vice versa) may be written:
> let rec safe (xl, yl) (x2, y2) =
xl <> x2 && yl <> y2 &&
x2 - xl <> y2 - yl && xl - y2 <> x2 - yl;;
val safe : int * int -> int * int -> boolA list of the positions on a n × n chess board may be generated using a list comprehension:
> let ps n =
[for i in 1 .. n
for j in 1 .. n ->
i, j];;
val ps : int -> (int * int) listA solution, represented by a list of positions of queens, may be printed to the console by printing a character for each position on a row followed by a newline, for each row:
> let print n qs =
for x in 1 .. n do
for y in 1 .. n do
printf "%s" (if mem (x, y) qs then "Q" else ".")
printf "
";;
val print : int -> (int * int) list -> unitSolutions may be searched for by considering each safe position ps and recursing twice. The first recursion searches all remaining positions, returning the accumulated solutions accu. The second recursion adds a queen at the current position q and filters out all positions attacked by the new queen before recursing:
> let rec search f n qs ps accu =
match ps with
| [] when length qs = n -> f qs accu
| [] -> accu
| q::ps ->
search f n qs ps accu;;
|> search f n (q::qs) (filter (safe q) ps);;
val search :
((int * int) list -> 'a -> 'a) -> int ->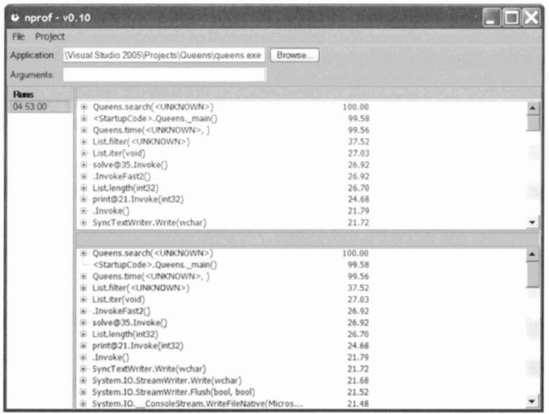
Figure 8.1. Profiling results generated by the freely-available NProf profiler for a program solving the queens problem on an 11 × 11 board.
(int * int) list -> (int * int) list -> 'a -> 'a
The search function is the core of this program. The approach used by this program, to recursively filter invalid solutions from a set of possible solutions, is commonly used in logic programming and is the foundation of some languages designed specifically for logic programming such as Prolog.
All solutions for a given board size n can be folded over using the search function. In this case, the fold prints each solution and increments a counter, finally returning the number of solutions found:
> let solve n =
let f qs i =
print n qs
i + 1
search f n [] (ps n) 0;;
val solve : int -> intThe problem can be solved for n = 8 and the number of solutions printed to the console (after the boards have been printed by the fold) with:
> printf "%d solutions " (solve 8);;
This program takes only 0.15s to find and print the 92 solutions for n = 8. To gather more accurate statistics in the profiler, it is useful to choose a larger n. Using n = 11, compiling this program to an executable and running it from the NProf profiler gives the results illustrated in figure 8.1.
The profiling results indicate that almost 30% of the running time of the whole program is spent in the List. length function. The calls to this function can be completely avoided by accumulating the length nqs of the current list qs of queens as well as the list itself:
> let rec search f n nqs qs ps accu =
match ps with
| [] when nqs = n -> f qs accu
| [] -> accu
| q::ps ->
search f n nqs qs ps accu
|> search f n (nqs + 1) (q::qs)
(filter (safe q) ps);;
val search :
((int * int) list -> 'a -> 'a) -> int -> int ->
(int * int) list -> (int * int) list -> 'a -> 'aThe solve function just initializes with zero length nqs as well as the empty list:
> let solve n =
let f qs i =
print n qs;
i + 1
search f n 0 [] (ps n) 0;;
val solve : int -> intThis optimization reduces the time taken to compute the 2,680 solutions for n = 11 from 34.8s to 23.6s, a performance improvement of around 30% as expected.
Profiling can be used to identify the performance critical portions of whole programs. These portions of the program can then be targeted for optimization. Algorithmic optimizations are the most important set of optimizations.
As we saw in chapter 3, the choice of data structure and of algorithm can have a huge impact on the performance of a program.
In the context of program optimization, intuition is often terribly misleading. Specifically, given the profile of a program, intuition often tempts us to perform low-level optimizations on the function or functions that account for the largest proportion of the running time of the program. Counter intuitively, the most productive optimizations often stem from attempts to reduce the number of calls made to the performance-critical functions, rather than trying to optimize the functions themselves. Programmers must always strive to "see the forest for the trees" and perform algorithmic optimizations before resorting to low-level optimizations.

Figure 8.2. Measured performance (time t in seconds) of mem functions over set, list and array data structures containing n elements.
If profiling shows that most of the time is spent performing many calls to a single function then, before trying to optimize this function (which can only improve performance by a constant factor), consider alternative algorithms and data structures which can perform the same computation whilst executing this primitive operation less often. This can reduce the asymptotic complexity of the most time-consuming portion of the program and is likely to provide the most significant increases in performance.
For example, the asymptotic algorithmic complexity (described in section 3.1) of finding an element in a container is O (log n) if the container is a set but 0(n) for lists and arrays (see Table 3.3). For large n, sets should be much faster than lists and arrays. Consequently, programs that repeatedly test for the membership of an element in a large container should represent that container as a set rather than as a list or an array.
An extensive review of the performance of algorithms used in scientific computing is beyond the scope of this book. The current favourite computationally-intensive algorithm used to attack scientific problems in any particular subject area is often a rapidly moving target. Thus, in order to obtain information on the state-of-the-art choice of algorithm it is necessary to refer to recently published research in the specific area.
Only once all attempts to reduce the asymptotic complexity have been exhausted should other forms of optimization be considered. We shall consider such optimizations in the next section.
The relative performance of most data structures is typically predicted correctly by the asymptotic complexities for n > 103. However, program performance is not always limited by a relatively small number of accesses to a large container. When performance is limited by many accesses to a small container. In such cases, n >103 and the asymptotic complexity does not predict the relative performance of different kinds of container. In order to optimize such programs the programmer must use a database of benchmark results as a first indicator for design and then optimize the implementation by profiling and evolving the program design to use the constructs that turn out to be most efficient in practice.
As F# is an unusual language with unusual optimization properties, we shall endeavour to present a wealth of benchmark results illustrating practically important "swinging points" between trade-offs.
The predictability of memory accesses is an increasingly important concern when optimizing programs. This aspect of optimization is becoming increasingly important because CPU speed is increasing much more quickly than memory access speed and, consequently, the cost of stalling on memory access is growing in terms of the amount of computation that could have been performed on-CPU in the same time. In a high-level language like F#, the machine is abstracted away and the programmer is not supposed to be affected by such issues but F# is also a high-performance language and, in order to leverage this performance, it can be useful to know why different trade-offs occur in terms of the underlying structures in memory.
The remainder of this chapter provides a great deal of information, including quantitative performance measurements, that should help F# programmers to opti-mize performance-critical portions of code.
The point at which asymptotic complexity ceases to be an accurate predictor of relative performance can be determined experimentally. This section presents experimental results illustrating some of the more important trade-offs and quantifying relevant performance characteristics on a test machine[18].
Measuring the performance of functions in any setting, other than those in which the functions are to be used in practice, can easily produce misleading results. Al-though we have made every attempt to provide independent performance measure-ments, effects such as the requirements put upon the garbage collector by the different algorithms are always likely to introduce systematic errors. Consequently, the per-formance measurements which we now present must be regarded only as indicative measurements.
Figure 8.2 demonstrated that asymptotic algorithmic complexity is a powerful indicator of performance. In that case, testing for membership using Set. mem was found to be over 106 × faster than List. mem for n = 106. However, the relative performance of lists, arrays and sets was not constant over n and, in particular, arrays were the fastest container for small n. Figure 8.3 shows the ratio of the times taken to test for membership in small containers. For n < 35, arrays are up to twice as fast as sets.

Figure 8.3. Relative time taken t = ts/ta for testing membership in a set (ts) and an array (t a) as a function of the number of elements n in the container, showing that arrays are up to 2x faster for n < 35.

Figure 8.4. Measured performance (time t in seconds per element) of List. of _array, Array. copy and Set. of _array data structures containing n elements.
As this example illustrates, benchmarking is required when dealing with many operations on small containers.
Figure 8.4 illustrates the time taken to create a list, array or set from an array. Array creation is fastest, followed by list creation and then set creation. For 103 elements on the test machine, creating a list element takes 16ns, an array element takes 6ns and a set element takes 1.9/µ s. Moreover, array creation takes an approximately-constant time per element regardless of the size of the resulting array whereas list and set creation takes longer per element for larger data structures, i.e. the total time taken to create an n -element list or set is not linear in n.

Figure 8.5. Measured performance (time t in seconds per element) of iter functions over list, array and set data structures containing n elements.
Although tests for membership and the set theoretic operations (union, intersection and difference) are asymptotically faster for sets than for lists and arrays, the fact that set creation is likely to be at least 300× slower limits their utility to applications that perform many elements lookups for every set creation. In fact, we shall study one such application of sets in detail in chapter 12.
Figure 8.5 illustrates the time taken to iterate over the elements of lists, arrays and sets. Iterating over arrays is fastest, followed by lists and then sets.
Iterating over a list is 4× slower than iterating over an array. The performance degredation for lists and sets when n is large is a cache coherency issue. Like most immutable data structures, both lists and sets allocate many small pieces of memory that refer to each other. These tend to scatter across memory and, consequently, memory access becomes the bottleneck when the list or set does not fit on the CPU cache. In contrast, arrays occupy a single contiguous portion of memory, so sequential access (e.g. iter) is faster for arrays. For example, iterating over a set is 8 × slower than iterating over an array for n = 103 and 15 × slower for n = 106.
Figure 8.6 illustrates the time taken to perform a left fold, summing the elements of a list, array or set in forward order. The curves are qualitatively similar to figure 8.5 for the iter functions but fold_left is up to 10× slower than iter.
Figure 8.7 illustrates the time taken to perform a right fold, summing the elements of a list, array or set. Left and right folds perform similarly for arrays and sets but lists show slightly different behaviour due to the stacking of intermediate results required to traverse the list in reverse order. Specifically, fold_right is 30% slower than fold_left for lists.
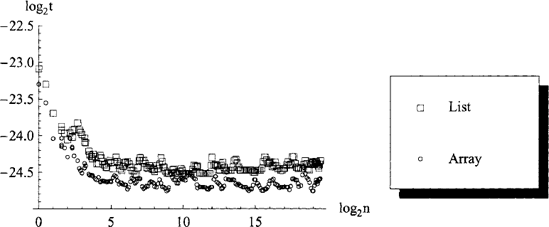
Figure 8.6. Measured performance (time t in seconds per element) of the fold_left functions over list and array data structures containing n elements.

Figure 8.7. Measured performance (time t in seconds per element) of the fold_right functions over list, array and set data structures containing n elements.

These benchmark results may be used as reasonably objective, quantitative evi-dence to justify a choice of data structure. We shall now examine other forms of optimization, in approximately-decreasing order of productivity.
The simplest way to improve the performance of an F# program is to instruct the F# compiler to put more effort into optimizing the code. This is done by providing an optimization flag of the form -Ooff, −01, −02 or -03 where the latter instructs the compiler to try as hard as possible to improve the performance of the program.
In Visual Studio, the optimization setting for the compiler is controlled from the Project
As a last resort, program transformations performed manually should be consid-ered as a means of optimization. We shall now examine several different approaches. Although we try to associate quantitative performance benefits with the various ap-proaches, these are only indicative and are often chosen to represent the best-case.
Straightforward recursion is very efficient when used in moderation. However, the performance of deeply recursive functions can suffer. Performance degradation due to deep recursion can be avoided by performing tail recursion [16].
If a recursive function call is not tail recursive, state will be stored such that it may be restored after the recursive call has completed. This storing, and the subsequent retrieving, of state is responsible for the performance degradation. Moreover, the intermediate state is stored on a limited resource known as the stack which can be exhausted, resulting in StackOverflowException being raised.
Tail recursion involves writing recursive calls in a form which does not need this state. Most simply, a tail call returns the result of the recursive call directly, i.e. without performing any computation on the result.
For example, a function to sum a list of arbitrary-precision integers may be written:
> let rec sum = function
| [] -> 0I
| h::t -> h + sum t;;
val sum : bigint list -> bigintSumming 104 elements takes 2ms:
> time sum [1I .. 10000I];; Took 2ms val it : bigint = 50005000I
Attempting to sum 105 elements exhausts stack space:
> time sum [1I .. 100000I] Process is terminated due to StackOverflowException
The result of the recursive call sum t in the body of the sum function is not returned directly but, rather, has h added to it to create a new value that is then returned. Thus, this recursive call to sum is not a tail call.
The sum function can be written in tail recursive form by accumulating the sum in an argument and returning the accumulator when the end of the list is reached:
> let rec sum_tr_aux (accu : bigint) = function
| [] -> accu
| h::t -> sum_tr_aux (h + accu) t;;
val sum_tr_aux : bigint -> bigint list -> bigintThe signature of the auxiliary function sum_tr_aux is not the same as that of sum, as it must now be initialized with an accumulator of zero. A tail recursive sum_tr function can be written in terms of sum_tr_aux by applying zero as the initial accumulator:
> let sum_tr list =
sum_tr_aux 0I list;;
val sum_tr : int list -> intAs this sum_tr function is tail recursive, it will not suffer from stack overflows when given long lists:
> time sum_tr [1I .. 10000I] Took 8ms val it : bigint = 50005000I > time sum_tr [1I .. 100000I] Took 47ms val it : bigint = 5000050000I > time sum_tr [1I . . 1000000I];; Took 196ms val it : bigint = 500000500000I
As we have seen, non-tail-recursive functions are not robust when applied to large inputs. However, many functions are naturally written in a non-tail-recursive form.
For example, the built-in List. fold_right function is most simply written as:
> let rec fold_right f list accu =
match list with
| [] -> accu
| h::t -> f h (fold_right f t accu);;
val fold_right : ('a -> 'b -> 'b) -> 'a list -> 'b -> 'bThis form is not tail recursive. The built-in List. fold_right function is actually tail recursive, and tries to be efficient, but it still has an overhead compared to the List. fold_left function (see figures 8.6 and 8.7). The reason for this overhead stems from the fact that the fold_left function considers the elements in the list starting at the front of the list whereas the fold_right function starts at the back. On a container that allows random access, such as an array, there is little difference between considering elements in forward or reverse order. However, the primitive operation used to decompose a list presents the first element and the remaining list. Consequently, looping over lists is more efficient in forward order than in reverse order.
Many standard library functions suffer from the inefficiency that results from having been transformed into the more robust tail recursive form. In the List module, the fold_right, map, append and concat functions are not naturally tail recursive.
Although the .NET platform is based upon a common language run-time (CLR) that allows seamless interoperability between programs written in different languages, the platform has been optimized primarily for the C# language. As a conventional imperative language, C# programs have a typical value lifetime distribution that is significantly different to that of most functional programs. Specifically, functional programs often allocate huge numbers of short-lived small values and standalone functional programming languages like OCaml are optimized for this [11]. As .NET is not optimized for this, allocation in F# is more expensive and, consequently, optimizations that avoid allocation are correspondingly more valuable when trying to make F# programs run more quickly.
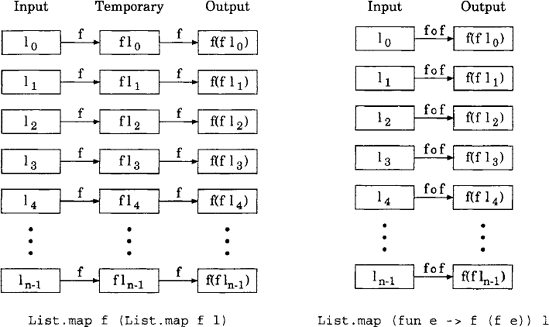
Figure 8.9. Deforestation refers to methods used to reduce the size of temporary data, such as the use of composite functions to avoid the creation of temporary data structures illustrated here: a) mapping a function f over a list 1 twice, and b) mapping the composite function f o f over the list 1 once.
Functional programming style often results in the creation of temporary data due to the repeated use of maps, folds and other similar functions. The reduction of such temporary data is known as deforestation. In particular, the optimization of performing functions sequentially on elements rather than containers (such as lists and arrays) in order to minimize the number of temporary containers created (illustrated in figure 8.9).
For example, the Shannon entropy H of a vector v representing a discrete proba-bility distribution is given by:
This could be written in F# by creating temporary containers, firstly ui = 1n vi and then wi = uivi and finally calculating the sum
> open List;;
> let entropyl v =
fold_left (+) 0.0 (map2 (*) v (map log v));;val entropyl : float list -> float
This function is written in an elegant, functional style by composing functions.
However, the subexpressions map log v for u and map2 (*) v (...) for w both result in temporary lists. Creating these intermediate results is slow. Specifically, the 0(n) allocations of all of the list elements in the intermediate results is much slower than any of the arithmetic operations performed by the rest of this function.
Fortunately, this function can be completely deforested by performing all of the arithmetic operations at once for each element, combining the calls to +, * and log into a single anonymous function:
> let entropy2 v =
fold_left (fun hv->h+v* log v) 0.0 v;;
val entropy2 : float list -> floatNote that this function produces no intermediate lists, i.e. it performs only 0 (1) allocations.
The deforested entropy2 function is much faster than the entropyl function. For example, it is ~ 14 × faster when applied to a 107-element list:
> time entropyl [1.0 .. 10000000.0];; Took 13 971ms val it : float = 7.809048631e+14 > time entropy2 [1.0 .. 10000000.0];; Took 1045ms val it : float = 7.809048631e+14
Deforesting can be a very productive optimization when using eager data structures such a lists, arrays, sets, maps, hash tables and so on. However, the map2 and map functions provided by the Seq module are lazy: rather than building an intermediate data structure they will store the function to be mapped and the original data structure. Thus, a third variation on the entropy function is deforested and lazy:
> let entropy3 v =
Seq.map2 (*) v (Seq.map log v)
|> Seq.fold (+) 0.0;;
val entropy3 : #seq<float> -> floatThe performance of a lazy Seq-based implementation is between that of the deforested and forested eager implementations:
> time entropy3 [1.0 .. 10000000.0];; Took 614 0ms val it : float = 7.809048631e+14
Lazy functions are usually slower than eager functions so it may be surprising that the lazy entropy3 function is actually faster than the eager entropyl function in this case. The reason is that allocating large data structures is proportionally much slower than allocating small data structures. As the Seq. map function is lazy, the entropy3 function never allocates a whole intermediate list but, rather, allocates intermediate lazy lists. Consequently, the lazy entropy3 function evades the allocation and subsequent garbage collection of a large intermediate data structure and is twice as fast as a consequence.
The lazy implementation can also be deforested:
> let entropy4 v =
Seq.fold (fun h v->h + v* log v) 0.0 v;;
val entropy4 : #seq<float> -> floatThis deforested lazy implementation is faster than the forested lazy implementation but not as fast as the deforested eager implementation:
> time entropy4 [1.0 .. 10000000.0];; Took 216 7ms val it : float = 7.809048631e+14
The deforested eager entropy2 function is the fastest implementation because it avoids the overheads of both intermediate data structures and laziness. Consequently, this style should be preferred in performance-critical code and, fortunately, it is easy to write in F# thanks to first-class functions and the built-in function composition operators.
Explicit declarations of compound data structures al-most certainly entail allocation. Consequently, a simple approach to avoiding copying is to write performance-intensive rewrite operations so that they reuse previous values rather than rebulding (copying) them.
For example, the following function contracts a pair where either element is zero but incurs a copy by explicitly restating the pair x, y even when the input is being returned as the output:
> let f = function
| 0, _ | _, 0 -> 0, 0
| x, y -> x, y;;
val f : int * int -> int * intThis function is easily optimized by returning the input as the output explicitly rather than using the expression x, y:
> let f = function
| 0, _ | _, 0 -> 0, 0
| a - > a;;
val f : int * int -> int * intThe second match case no longer incurs an allocation by unnecessarily copying the input pair.
Referential equality (described in section 1.4.3) can be used to avoid unneces-sary copying. This typically involves checking if the result of a recursive call is referentially equal to its input.
Consider the following implementation of the insertion sort:
> let rec sortl = function
| [] -> []
| X::XS ->
match sortl xs with
| y::ys when x > y -> y::sortl(x::ys)
| ys -> X::ys;;
val sortl : 'a list -> 'a listIn general, this is an adequate sort function only for short lists because it has 0(n2) complexity where n is the length of the input list. However, if the sortl function is often applied to already-sorted lists then this function is unnecessarily inefficient because it always copies its input.
The following optimized implementation uses referential equality to spot when the list x: : xs that is being reconstructed and returned will be identical to the given list and returns the input list directly when possible:
> let rec sort2 = function
| [] -> []
| x::xs as list ->
match sort2 xs with
| y::ys when x > y -> y::sort2(x::ys)
| ys -> if xs == ys then list else x::ys;;
val sort2 : 'a list -> 'a listThis approach used by the sort2 function avoids unnecessary copying and can improve performance when the input list is already sorted or when insertions are required near the front of the list.
Algorithms may execute more quickly if they can avoid unnecessary computation by terminating as early as possible. However, the trade-off between any extra tests required and the savings of exiting early can be difficult to predict. The only general solution is to try premature termination when performance is likely to be enhanced and revert to the simpler form if the savings are not found to be significant. We shall now consider a simple example of premature termination as found in the core library as well as a more sophisticated example requiring the use of exceptions.
The for_all function in the List module is an enlightening example of an early-terminating function. This function applies a predicate function p to elements in a list, returning true if the predicate was found to be true for all elements and false otherwise. Note that the predicate need not be applied to all elements in the list, as the result is known to be false as soon as the predicate returns false for any element. The for_all function may be written:
> let rec for_alll p = function
| [] -> true| h::t -> p h && for_alll p t;;
val for_alll : ('a -> bool) -> 'a list -> boolThe premature termination of this function is not immediately obvious. In fact, the && operator has the unusual semantics of in-order, short-circuit evaluation. This means that the expression p h will be evaluated first and only if the result is true will the expression for_a111 p tbe evaluated. Consequently, this implementation of the for_al1 function can return false without recursively applying the predicate function p to all of the elements in the given list.
Moreover, the short-circuit evaluation semantics of the && operator makes the above function equivalent to:
> let rec for_alll p = function
| [] -> true
| h::t -> if p h then for_alll p t else false;;
val for_alll : ('a -> bool) -> 'a list -> boolConsequently, these for_all functions are actually tail recursive (the result of the call for_al1 p t is returned without being acted upon).
These implementations of the for_all function are very efficient. Terminating on the first element takes under 50ns:
> [1 . . 1000] |> time (loop 100000 (for_alll ((<>) 1)));; Took 5ms val it : bool = false
Terminating on the 1000th element takes 11µ s:
> [1 . . 1000] |> time (loop 100000 (for_alll ((<>) 1000)));; Took 1144ms val it : bool = false
These performance results will now be used to compare an alternative exit strategy: exceptions.
A similar function may be written in terms of a fold:
> let for_all2 p list =
List.fold_left (&&) true list;;
val for_all : ('a -> bool) -> 'a list -> boolHowever, this for_a112 function will apply the predicate p to every element of the list, i.e. it will not terminate early.
The fold-based implementation can be made to terminate early by raising and catching an exception:
> let for_a113 p list =
try
let f b h = p h && raise ExitList.fold_left f true list
with
| Exit ->
false;;
val for_all3 : ('a -> bool) -> 'a list -> boolIndeed, there is now no reason to accumulate a boolean that is always true. The function can be written using iter or a comprehension instead of a fold:
> let for_all4 p list =
try
for h in list do
if not (p h) then raise Exit
true
with
| Exit ->
false;;
val for_all4 : ('a -> bool) -> 'a list -> boolThis function has recovered the asymptotic efficiency of the original for_alll function but the actual performance of this for_a114 function cannot be determined without measurement. Indeed, as exceptions are comparatively slow in .NET the exception-based approach is likely to be significantly slower when the exception is raised and caught.
When terminating on the first element, the performance is dominated by the cost of raising and catching an exception. The time taken to return at the first element is 29 µ s:
> [1 . . 1000];; |> time (loop 100000 (for_all4 ((<>) 1)));; Took 2862ms val it : bool = false
Terminating on the 1000th element takes 43µ s:
> [1 . . 1000];; |> time (loop 100000 (for_all4 ((<>) 1000)));; Took 426 9ms val it : bool = false
In the latter case, a significant amount of other computation is performed and the performance cost of the exception is not too significant. Consequently, the for_all4 function is 4×slower than the original for_alll function. However, if the flow involves a small amount of computation and an exception, as it does in the former case, then the exceptional route is 600 × slower. This is such a signifi-cant performance difference that the standard library provides alternative functions for performance critical code that avoid exceptions in all cases. For example, the assoc and find functions in the List module have try_assoc and try find alternatives that return an option result to avoid raising an exception when a result is not found.
In F#, applying functions as arguments can lead to slower code. Consequently, avoiding higher-order functions in the primitive operations of numerically-intensive algorithms can significantly improve performance.
For example, a function to sum an array of floating point numbers may be written in terms of a fold:
> let suml a =
Array.fold_left (+) 0.0 a;;
val suml : float array -> floatAlternatively, the function may be written using an explicit loop rather than a fold:
> let sum2 a =
let r = ref 0.0
for i = 0 to Array.length a - 1 do
r := !r + a. [i]
!r;;
val sum2 : float array -> floatClearly, the fold has significantly reduced the amount of code required to provide the required functionality.
The overhead of using a higher-order function results in the suml function exe-cuting significantly more slowly than the sum2 function:
> let a = Array.init 10000000 float;; val a : float array > time suml a;; Took 3 76ms val it : float = 4.9999995el3 > time sum2 a;; Took 104ms val it : float = 4.9999995el3
In this case, the sum2 function is 3.6× faster than the suml function. In fact, performance can be improved even more by using a mutable value.
The mutable keyword can be used in a let binding to create a locally mutable value. Mutable values are not allowed to escape their scope (e.g. they cannot be used inside a nested closure). However, mutable values can be more efficient than references.
For example, the previous section detailed a function for summing the elements of a float array. The fastest implementation used a reference for the accumulator but this can be written more efficiently using a mutable:
> let sum3 a =
let mutable r = 0.0
for i = 0 to Array.length a - 1 do
r <- r + a. [i] r;;
val sum3 : float array -> floatUsing a mutable makes this sum3 function 2.7×faster than the fastest previous implementation sum2 that used a reference:
> time sum3 a;; Took 3 9ms val it : float = 4.9999995el3
The combination of avoiding higher-order functions and using mutable makes this sum3 function 9.6 × faster than the original suml.
Particularly in the context of scientific computing, F# programs can benefit from the use of specialized high-performance functions. This includes some complicated numerical algorithms for matrix and Fourier analysis, which will be covered in chapter 9, but the F# standard library also provides some fast functions for common mathematical values.
The built-in vector type implements arbitrary-dimensionality vectors with float elements and provides operators that are considerably faster than equivalent functions from the Array module:
> let a, b = [|1.0 .. 1000.0|], [|l.O .. 1000.0 |];;
val a : float array
val b : float array
> time (loop 100000 (Array.map2 (+) a)) b
|> ignore;;
Took 5744ms
val it : unit = ()
> (vector a, vector b)
|> time (loop 100000 (fun (a, b) -> a + b))
|> ignore;;
Took 2 014ms
val it : unit = ()In this case, vector addition is 2.9 × faster using the specialized vector addition.

Typically in functional languages, most values are boxed. This means that a value is stored as a reference to a different piece of memory. Although elegant in pro-viding efficient referential transparency, unnecessary boxing can incur significant performance costs.
For example, much of the efficiency of arrays stems from their elements occupying a contiguous portion of memory and, therefore, accesses to elements with similar indices are cache coherent. However, if the array elements are boxed, only the references to the data structures will be in a contiguous portion of memory (see figure 8.10). The data structures themselves may be at completely random locations, particularly if the array was not filled sequentially. Consequently, cache coherency may be very poor.
For example, computing the product of an array of complex numbers is unnec-essarily inefficient when the numbers are represented by a (float * float) array (see figure ??). A struct is often more efficient as this avoids all unboxing (see figure 8.11).
A function to compute the product of an array of complex numbers might be written over the type (float * float) array, where each element is a 2-tuple representing the real and imaginary parts of a complex number:
> let productl zs =
let mutable re = 1.0
let mutable im = 0.0
for i = 0 to Array.length zs - 1 do
let zr, zi = zs.[i]
let r = re * zr - im * zi
and i = re * zi + im * zr
re <- rim <- i
re, im;;
val productl : (float * float) array -> float * floatTo avoid boxing completely, the complex number can be stored in a struct:
> type Complex = struct
val re : float
val im : float
newfx, y) = { re = x; im = y }
end;;A more efficient alternative may act upon values of the type Complex array:
> let product2 (zs : Complex array) =
let mutable re = 1.0
let mutable im = 0.0
for i = 0 to Array.length zs - 1 do
let r = re * zs.[i].r - im * zs.[i].i
and i = re * zs.[i].i + im * zs.[i].r
re <- r
im <- i
re, im;;
val product2 : Complex array -> float * floatBenchmarking these two functions compiled to native code with full compiler optimizations and acting upon randomly shuffled 224-element arrays, we find that the tuple-based productl function takes 1.94s to complete and the struct-based product 2 function takes only 0.25s.
The definition of a local function or the partial application of a curried function can create a closure. This functionality is not provided by the .NET platform and, con-sequently, F# must distinguish between the types of ordinary functions and closures to remain compatible. The type of a closure is bracketed, so ' a - > ' b becomes ('a -> 'b).
For example, both of the following functions compute the next integer and may be used equivalently in F# programs but the former is an ordinary function (like a C# function) whereas the latter is a closure that results from partial application of the curried + function:
> let succ1 n =
n + 1;;
val succl : int -> int
> let succ2 =
(+) 1;;
val succ2 : (int -> int)Closures encapsulate both a function and its environment (such as any partially applied arguments). Consequently, closures are heavier than functions and the cre-ation and invocation of a closure is correspondingly slower. In fact, the F# compiler translates a closure into an object that encapsulates the environment and function.
The F# programming language provides an inline keyword that provides a simple way to inline the body of a function at its calls sites:
> let f x y = x + y;; val f : int -> int -> int > let inline f x y = x + y;; val f : ^a -> ^b -> ^c when ^a : (static member (+) : ^a -> ^b -> ^c)
The body of the function marked inline will be inserted verbatim whenever the function is called. Note that the type of the inlined function is very different. This is because ordinary functions require ad-hoc polymorphic functions such as the + operator to be ossified to a particular type, in this case the default type int. In contrast, the inlining of the function in the latter case allows the body of the function to adopt whatever type is inferred from any context it is inserted into individually. Hence its type requires only that a + operator is defined in the context of the call site.
The performance implications of inlining vary wildly, with numeric code often benefitting from judicious inlining but the performance of symbolic code is often deteriorated by inlining.
The F# input_value and output_value functions or the standard .NET serialization routines themselves can be used to store and retrieve arbitrary data using a binary format. However, at the time of writing these routines in the .NET library are not optimized and require as much space as a textual format and often take several times as long as a custom parser to load. In particular, the current .NET serialization implementation has quadratic complexity when serializing data structures containing many shared functions. This includes the serialization of data structures that contain INumeric implementations, such as the F# vector and matrix types.
Consequently, programs with performance limited by IO may be written more efficiently by handling custom formats, such as textual representations of data (parsed using the techniques described in chapter 5) or even using a custom binary format. CPU performance has increased much more quickly than storage performance and, as a consequence, data compression can sometimes be used to improve IO performance by reducing the amount of data being stored in exchange for a higher CPU load.
Having examined the many ways F# programs may be optimized, we shall now review existing libraries which may be of use to scientists.