
This technique aims at imitating our capacity to evade walls by considering a safety margin, and creating repulsion from their surfaces when that gap is broken.
This technique uses the RaycastHit structure and the Raycast function from the physics engine, so it's recommended that you take a refresher on the docs in case you're a little rusty on the subject.
Thanks to our previous hard work, this recipe is a short one:
- Create the
AvoidWallbehavior derived fromSeek:using UnityEngine; using System.Collections; public class AvoidWall : Seek { // body } - Include the member variables for defining the safety margin, and the length of the ray to cast:
public float avoidDistance; public float lookAhead;
- Define the
Awakefunction to set up the target:public override void Awake() { base.Awake(); target = new GameObject(); } - Define the
GetSteeringfunction for the following steps:public override Steering GetSteering() { // body } - Declare and set the variable needed for ray casting:
Steering steering = new Steering(); Vector3 position = transform.position; Vector3 rayVector = agent.velocity.normalized * lookAhead; Vector3 direction = rayVector; RaycastHit hit;
- Cast the ray and make the proper calculations if a wall is hit:
if (Physics.Raycast(position, direction, out hit, lookAhead)) { position = hit.point + hit.normal * avoidDistance; target.transform.position = position; steering = base.GetSteering(); } return steering;
We cast a ray in front of the agent; when the ray collides with a wall, the target object is placed in a new position taking into consideration its distance from the wall and the safety distance declared and delegating the steering calculations to the Seek behavior; this creates the illusion of the agent avoiding the wall.
We could extend this behavior by adding more rays, like whiskers, in order to get better accuracy. Also, it is usually paired with other movement behaviors, such as Pursue, using blending.
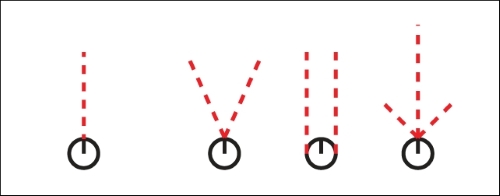
The original ray cast and possible extensions for more precise wall avoidance